机器视觉中如何选择相机与对应的镜头

工业面阵相机成像原理及分类

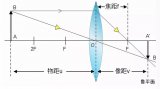
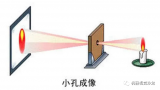
计算摄影学基石:相机成像原理

相机标定中的坐标变换原理难点分析

通过将异步获取的图像与LiDAR点云对准的方案
工业相机常用的相机标定方法
机器视觉常见的问题及解决

摄像机成像控制技术之3A算法解读

基于3D立方体中的微观金属物体

AVM环视系统:鱼眼相机去畸变算法及实战
如何判断线扫相机项目中定量判断机构运动是否匀速呢
双目检测的原理是什么?双目视觉的工作流程
相机标定为什么能够达到小于0.01像素误差的精度?

 下载APP
下载APP
 搜索内容
搜索内容
