陀螺仪三轴六轴区别

磁力计LIS2MDL开发(3)----九轴姿态解算
磁力计LIS2MDL开发(1)----轮询获取磁力计数据
陀螺仪LSM6DSV16X与AI集成(4)----Qvar触摸电容配置

陀螺仪LSM6DSV16X与AI集成(3)----读取融合算法输出的四元数
陀螺仪LSM6DSV16X与AI集成(2)----姿态解算
陀螺仪LSM6DSV16X与AI集成(1)----轮询获取陀螺仪数据

基于FPGA的平衡小车设计
提高IMU性能的四种方法分享
驱动LSM6DS3TR-C实现高效运动检测与数据采集(4)----上报匿名上位机实现可视化
驱动LSM6DS3TR-C实现高效运动检测与数据采集(3)----获取传感器数据
驱动LSM6DS3TR-C实现高效运动检测与数据采集(2)----配置滤波器
驱动LSM6DS3TR-C实现高效运动检测与数据采集(1)----获取ID
基于飞控的姿态估计算法作用及原理

蔚来NIO的ADAM的控制板技术拆解
什么是图像稳定?图像稳定已成为智能手机必备功能

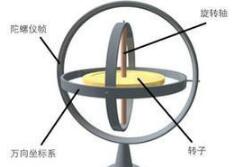
陀螺仪的工作原理 陀螺仪和重力传感器有何区别
常见的几种陀螺仪工作原理

什么是IMU传感器 IMU传感器在自动驾驶汽车的关键应用
陀螺仪传感器与加速度传感器的区别

 下载APP
下载APP
 搜索内容
搜索内容
