

爱普生M-G366PDG惯性测量单元IMU成为动中通天线系统的理想选择
IMU与压电薄膜传感器在机器人领域的应用

零知开源——ESP8266结合ICM20948实现高精度姿态解算

EPSON的IMU M-G330PDG0可应用于测绘巡检机载挂载

惯性测量单元传感器在自主移动机器人的应用
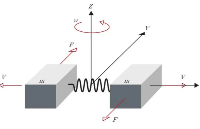
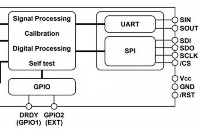
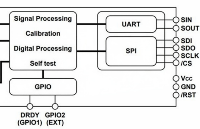
爱普生惯性测量单元的工作原理
惯性测量单元的作用和组成
爱普生M-G366PDG适用于商用车自动驾驶领域
爱普生M-G330PDG在测绘巡检机载挂载的应用

恩智浦i.MX95打造高级数字互联仪表盘方案颠覆两轮车骑行体验

基于旋转平移解耦框架的视觉惯性初始化方法

视觉惯性里程计(VIO)在运动估计中的优势及应用

基于柔性无线IMU传感器的稀疏传感网络

如何利用NVIDIA Isaac Sim对工作站的摄像头性能进行基准测试呢?

基于Crazyflie和TOF传感器的自旋停效果实现
请问在动态应用中IMU F99如何实现准确的倾角测量呢?

ORB-SLAM3整体结构框架分析

基于事件的视觉惯性速度计

无人机为何要从消费级向工业级方向转型?

IMU预积分功能数据初始化代码解读

 下载APP
下载APP
 搜索内容
搜索内容
