什么是LiDAR?LiDAR技术的新时代 前景广阔未来可期
适用于自主驾驶车辆 LiDAR 的 GaN FET 快速指南
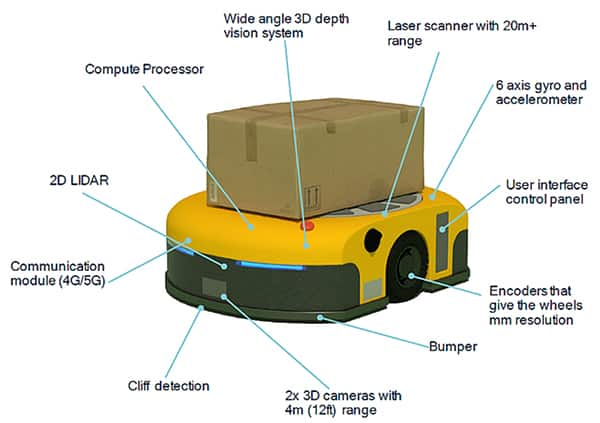
传感器融合如何使 AMR 在工厂车间内高效移动
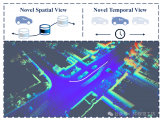
LiDAR4D:基于时空新颖的LiDAR视角合成框架

基于掩码模型的LiDAR感知模型预训练策略

车载激光雷达到底安不安全?

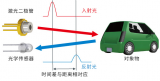
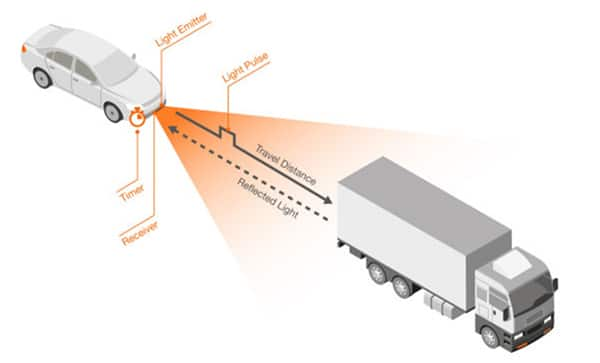
激光雷达LIDAR基本工作原理

基于LiDAR点流的运动事件检测

做一个激光雷达,需要哪些基本部件?

基于新一代SPAD架构的长距激光雷达
基于神经辐射场的自监督多相机占用预测

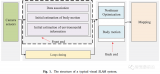
基于深度学习的LiDAR SLAM框架(DeepPointMap)

2D图像和LiDAR的3D点云之间的配准方法

什么是激光雷达?LiDAR系统的工作原理及解决方案

通过将异步获取的图像与LiDAR点云对准的方案

基于LiDAR的行人重识别的研究分析

硬核,从零制作一个激光雷达需要多久?

室内环境大规模雷达SLAM具体原理是什么?
基于视觉SLAM的研究现状
LiDAR揭秘:“波长大辩论”的深入指导

 下载APP
下载APP
 搜索内容
搜索内容
