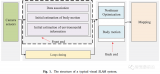
基于视觉SLAM的研究现状
LiDAR揭秘:“波长大辩论”的深入指导
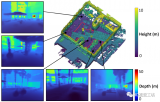
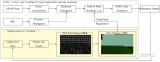
LiDAR和立体视觉摄像头如何处理弱光、黑暗环境?

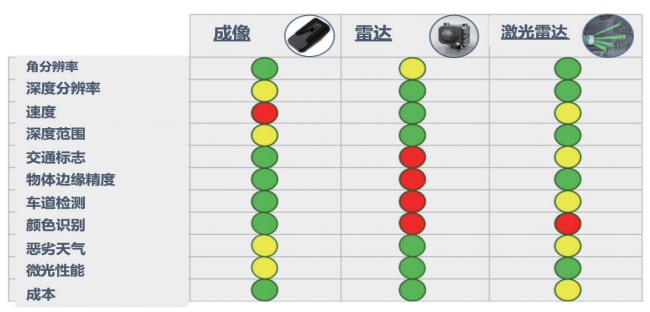
一文解析雷达、LiDAR和摄像头
基于NeRF的实时激光雷达SLAM算法

硅光LiDAR芯片设计的进展

基于统一BEV表征的多任务多传感器融合技术
VoxelMap++:在线LiDAR惯性里程计实现可合并的体素建图方法
无人驾驶汽车怎么实现自动驾驶的 自动驾驶关键技术是什么

汽车电子激光雷达和相机的自动在线外参标定技术
机器视觉算法的局限性有哪些方面

LOG-LIO: 一种高效局部几何信息估计的激光雷达惯性里程计方法

汽车激光雷达技术面临的机遇和挑战是什么
应用于机器人3D感知的高精度LiDAR与电机驱动解决方案
基于AOBS和芯片级器件的远距离激光雷达原理
均匀B样条采样从LiDAR数据中快速且鲁棒地估计地平面

一文详解激光雷达
微型化自由运行单光子探测器的设计实现
全芯时代单通道低侧GaN驱动器
自动驾驶汽车激光雷达传感器指南

 下载APP
下载APP
 搜索内容
搜索内容
