
一个用于周视语义占用网格感知的基准测试

ORB-SLAM3整体流程详解
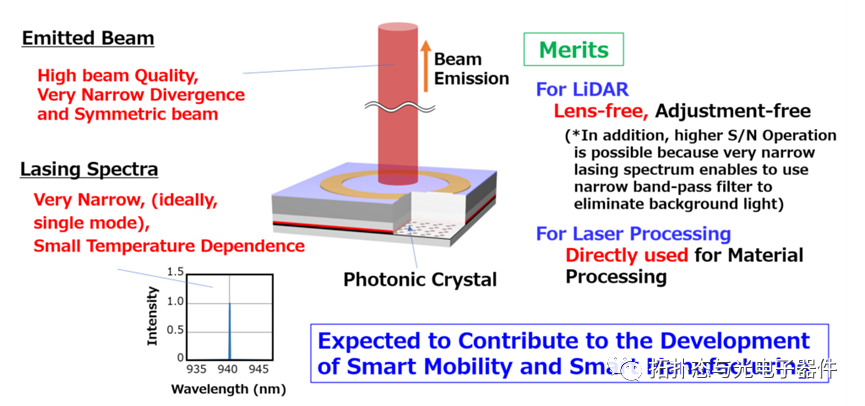
实现100w~1kw单模工作PCSEL的一般方法
激光点云感知三维空间介绍

激光雷达SLAM中高效的点云数据结构
LargeKernel3D:在3D稀疏CNN中使用大卷积核
IMU进行普通的3D SLAM能得到什么样的结果呢?
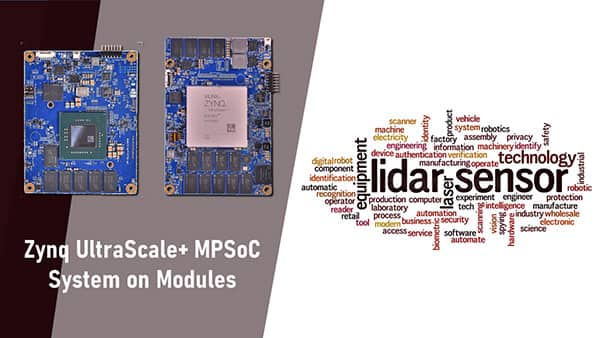
用于LiDAR的Zynq UltraScale+ MPSoC系统级模块

 下载APP
下载APP
 搜索内容
搜索内容
