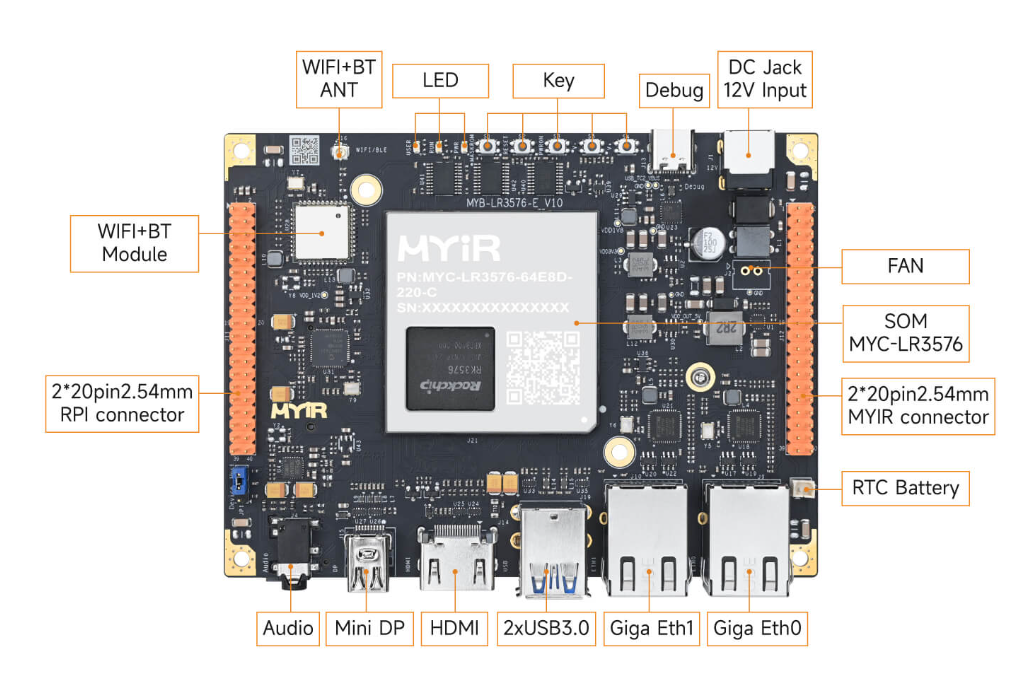
RK3576 + ROS2 SLAM建图与导航实战

什么是激光雷达 3D SLAM技术?

全新轻量级ViSTA-SLAM系统介绍

SLAM技术在智能驾驶领域的应用

一种适用于动态环境的自适应先验场景-对象SLAM框架

基于深度学习的增强版ORB-SLAM3详解

一种适用于动态环境的实时RGB-D SLAM系统

一种适用于动态环境的3DGS-SLAM系统

三维高斯泼溅大规模视觉SLAM系统解析
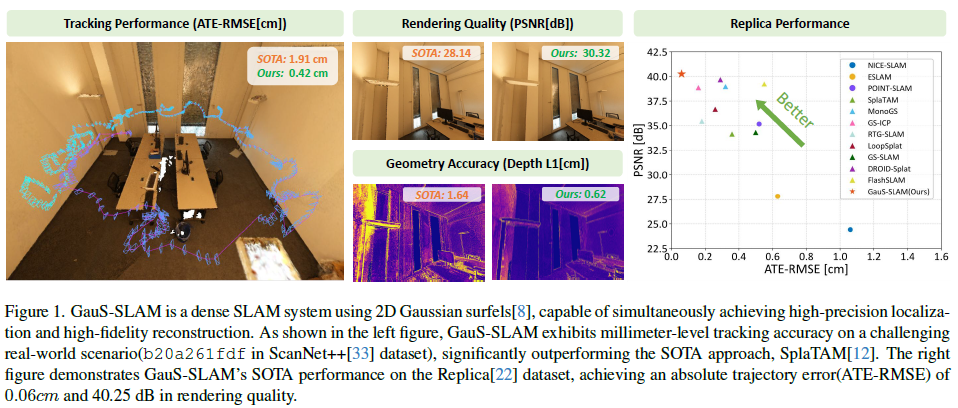
基于高斯的稠密视觉SLAM研究

一种基于点、线和消失点特征的单目SLAM系统设计
一种基于MASt3R的实时稠密SLAM系统

用于任意排列多相机的通用视觉里程计系统
用于SLAM中点云地图综合评估的开源框架

一种降低VIO/VSLAM系统漂移的新方法

自动驾驶中常提的SLAM到底是个啥?

激光雷达在SLAM算法中的应用综述

镭神智能机器人3D SLAM无人叉车应用案例:国内知名移动电源企业的智能化升级

一种半动态环境中的定位方法

一种适用于动态环境的实时视觉SLAM系统

 下载APP
下载APP
 搜索内容
搜索内容
