
资料下载


HC-SR04超声波传感器开源分享
李霞
分享资料个
描述
在这个项目中,我将向您介绍 HC-SR04 超声波传感器。它的工作原理是从发射器发送声波,然后声波从物体上弹回,然后返回接收器。您可以通过声波返回传感器所需的时间来确定某物距离多远。让我们开始吧!
连接
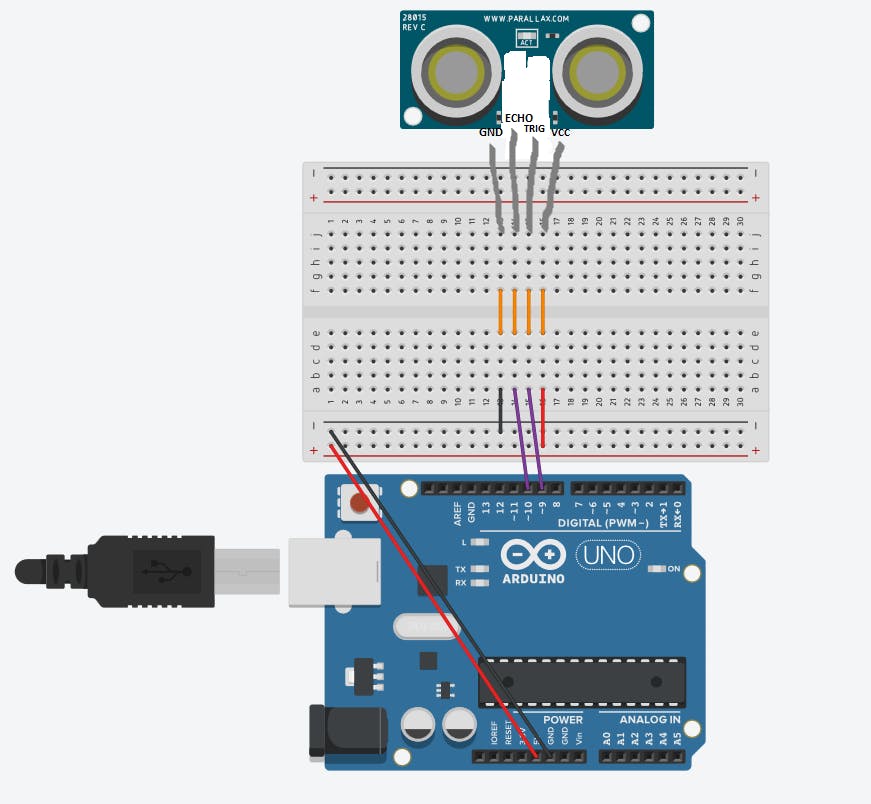
连接非常简单:
- VCC 至 5V
- 接地到接地
- 触发引脚 9
- 回声到引脚 10
您实际上可以将 Trig 和 Echo 连接到您想要的任何引脚,9 和 10 只是我正在使用的引脚。
代码
首先我们定义 Trig 和 Echo 连接的引脚。
const int trigPin = 9;
const int echoPin = 10;
然后我们声明 2 个浮点数,duration和distance,它们将保存声波的长度和物体的距离。
float duration, distance;
接下来,在设置中,我们将 Trig 引脚声明为输出,将 Echo 引脚声明为输入,并开始串行通信。
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
现在,在循环中,我们首先将 trigPin 设置为低电平 2 微秒,以确保该引脚首先处于低电平。然后,我们将其设置为高电平 10 微秒,从发射器发出 8 周期的声波脉冲,然后物体反弹并击中接收器(连接到 Echo Pin)。
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
当声波撞击接收器时,无论波传播了多长时间,它都会将 Echo 引脚调高。为此,我们可以使用一个方便的 Arduino 函数pulseIn() 。它需要 2 个参数,您正在收听的引脚(在我们的例子中是 Echo 引脚)和一个状态(高或低)。该功能的作用是等待引脚进入您输入的任何状态,开始计时,然后在切换到其他状态时停止计时。在我们的例子中,我们会设置 HIGH,因为我们想在 Echo 引脚变高时开始计时。我们将时间存储在持续时间变量中。(它以微秒为单位返回时间)
duration = pulseIn(echoPin, HIGH);
现在我们有时间了,我们可以使用等式speed = distance/time ,但我们会把时间 x 速度 = 距离,因为我们有速度。我们有什么速度?当然是音速!声速约为每秒 340 米,但由于pulseIn()函数以微秒为单位返回时间,因此我们还需要以微秒为单位的速度,这很容易获得。在谷歌上快速搜索“以厘米/微秒为单位的声速”会发现它是 .0343 c/μS。您可以进行数学运算,但搜索起来更容易。不管怎样,有了这些信息,我们就可以计算出距离了!只需将持续时间乘以 .0343,然后除以 2(因为声波传播到物体并返回)。我们将把它存储在距离变量。
distance = (duration*.0343)/2;
剩下的只是将结果打印到串行监视器。
Serial.print("Distance: ");
Serial.println(distance);
delay(100);
}

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





