
资料下载


机器人切割系统及其控制系统的解析
分享资料个
本文介绍了基于运动控制卡的机器人智能切割系统的软硬件设计。该机器人具有四个自由度,采用三轴联动的工作方式,第三轴可与选定的两轴的运动轨迹保持正切。实验表明该机器人切割系统工作稳定,满足玻璃切割等行业的加工要求。
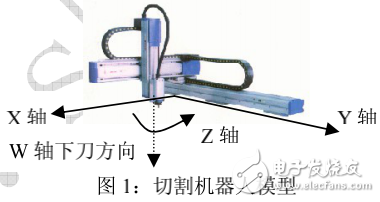
工业机器人是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备,特别适合于多品种、变批量的柔性生产设备。根据机器人的动作形态,一般可分为下面五类:圆柱坐标型机器人、球坐标型机器人、直角坐标型机器人、关节型机器人、并联机器人。切割机器人属于直角坐标型的工业机器人,每种类型的切割机器人都对应着特定的加工材料和加工工艺,如国内开发的高压水切割机器人,型钢机器人切割系统等。对于玻璃等脆性材料,由于需要采用带有金刚石的刀具,这就要求刀头的角度必须始终与切割图形的轨迹保持正切,以具有最好的刀印和开片效果,正是基于这样的应用,我们开发了这样的机器人智能切割系统。该机器人模型示意图如图 1 所示:
运动控制系统及结构框图:
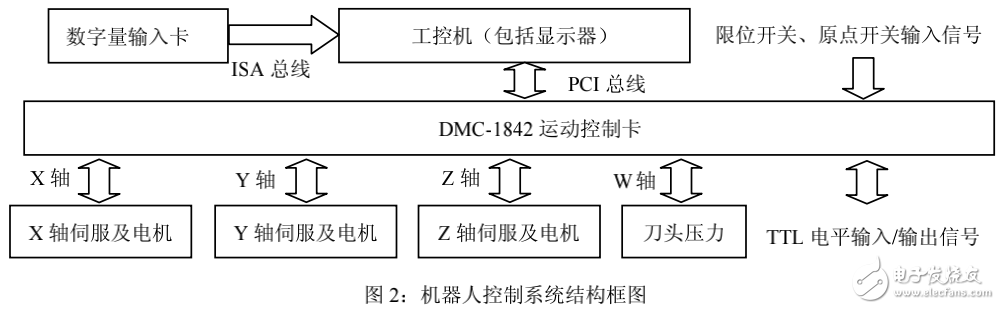
机器人运动控制采用美国GALIL公司的PCI总线的DMC-1842 运动控制卡[1],该控制卡采用 32 位微处理器,可控制 4 轴,具有多轴直线插补、圆弧插补等功能,为了得到最佳控制效果,GALIL控制卡提供了含有速度、加速度前馈,Notch及低通滤波的PID滤波器补偿功能,所有滤波器参数均可调整,以求伺服系统获得最佳性能。机器人交流伺服驱动系统的工作模式设定为速度模式,以获得最佳的速度响应性能,在所有伺服参数中,速度指令电压幅值VCMS和速度环比例增益Kvp会串联到系统主回路中,对系统性能的影响最大,需要和控制卡的参数联合整定。机器人运动控制系统结构框图如图 2 所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




