
资料下载


自动驾驶仿真平台的研究论文详细资料概述
linan0890
分享资料个
电子、信息和通信技术的迅速发展(导致计算机、传感器和网络性能的小型化和提高)导致了几种自动车辆(AV)技术的发展[1]车辆,如汽车或卡车,其中人类驾驶员从未被要求控制以安全操作车辆。也被称为自主或“无人驾驶”汽车,它们结合传感器和软件来控制、导航和驾驶汽车。“对Thrun[3]来说,AV是“一种无人机,能够感知其环境并在无需人工输入的情况下导航”。然而,讨论自主汽车的标准方法是交谈关于汽车工程师学会(SAE)定义的“自动驾驶水平”。汽车工程师学会(SAE)是一个汽车标准化机构,它将汽车的自动驾驶能力划分为六个水平,从最基本的系统到100%的自动驾驶。这些水平有助于衡量某款自主汽车的技术有多先进。这开辟了许多研究和发展领域,尽管这些领域最终是相互关联的,但却对应着非常多样化的领域。
在这一演变的同时,为测试视听功能而制定的过程和程序(功能要求和规定)也在过去几十年中得到了发展和确立。然而,有人担心这种技术可能产生的后果,特别是对人身安全、可能导致撞车的机械故障以及这种事故的费用。为了保证AV的安全性和降低成本,必须对不同的场景进行建模和测试。自主车辆的系统测试可以在仿真环境中进行,也可以在物理环境中进行。物理测试提供真实的测试场景,工程师可以使用实际的车辆而不是模型。然而,法规限制了这些车辆在城市中的使用;因此,要使用真正的AVs进行测试,需要使用昂贵的硬件和现场测试,这需要花费相当长的时间。根据最近发表的报告[5,6],不可能在合理的时间范围内进行验证自主汽车安全性的经验现场试验。在这种情况下,模拟、建模和测试有可能填补这一空白,并使严格、可控和及时的评估视听系统成为可能。
研究界认识到三种类型的模拟〔7〕:实弹、虚拟和构造(LVC),实弹模拟只是一种作战测试,使用传感器识别哪些系统已被模拟射击、实弹部队和实弹设备损坏。这是最接近实际使用的练习。虚拟仿真(“X-in-the-loop”)可以用计算机或其他人工生成的刺激来测试完整的系统原型。这种锻炼是典型的发育测试。构造性仿真是一个或多个系统的计算机专用表示。因此,模拟可以从操作测试到完全由计算机生成的系统对多个输入的反应表示(即不涉及系统组件)。它可以用于以下几个目的:(1)操作和开发测试的设计和评估;(2) 模拟,考虑到系统聚合的级别、系统单个组件(例如,系统软件)的建模级别或系统作为一个整体的建模级别,以建模一个完整的原型并建模多个系统交互(即雷达组件与系统)
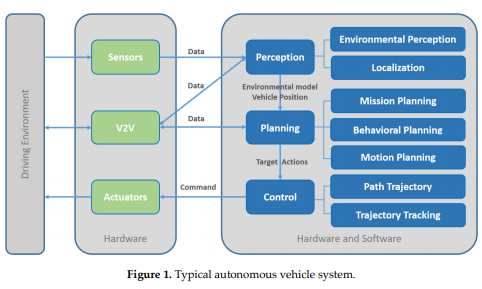
然而,正如在第8条中所揭示的,首先要考虑的是可以通过仿真测试的特性或系统的类型(见图1)。在这项工作中,我们将注意力集中在自主车辆的感知上,提供更大的自主性和复杂性,强调它们的子系统(9):环境感知和定位。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



