
资料下载


×
四旋翼飞行器悬停算法设计与实现
消耗积分:2 |
格式:pdf |
大小:1.61 MB |
2020-04-14
李木木木
分享资料个
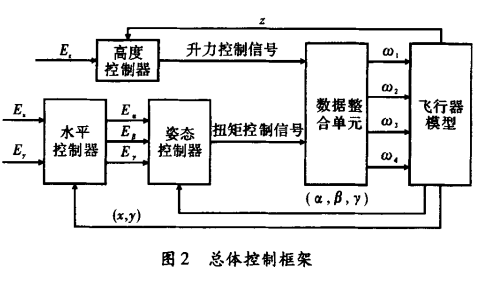
对四旋翼飞行器悬停困难的问题,从外力平衡与外力矩平衡两点出发,根据牛顿一欧拉方程对悬停状态下的飞行器建立动力模型,利用PID控制理论进行回路控制,设计了四旋翼飞行器的悬停算法。现场飞行测试结果为飞行器在水平范围±2 m、垂直范围±l m的空间范围内漂移,实现了飞行器的悬停功能。
四旋翼飞行器与常规飞行器相比,具有机动性高、控制灵活、可垂直起降、自由悬停等特点,近年来成为航空领域的研究热点。早些年,国际上已有诸多科学机构致力于四旋翼飞行器控制技术的研究,并取得良好的成果,具体代表有Draganflyer公司、宾夕法尼亚大学的 HMX4实验室等。而国内在这方面起步相对较晚uJ。悬停功能作为四旋翼飞行器独特的动力特性之一,一直是研究的热点及难点。本文通过分析四旋翼飞行器的受力,建立了其在悬停状态下的动力学模型,针对飞行器易受干扰和灵敏度高的特点利用经典PID 算法设计了位置控制回路。在Matlab/Simulink平台上,对模型的悬停模式进行控制仿真,并做了大量现场飞行测试,测试效果良好。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






