
资料下载


如何使用四元数实现四旋翼无人飞行器的轨迹跟踪控制
fgsdg
分享资料个
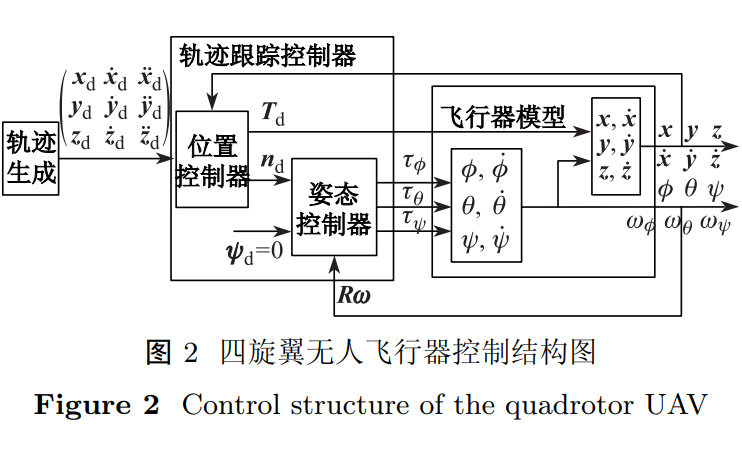
四旋翼无人飞行器具有复杂的数学模型,但现有控制方法大多是基于系统简化模型提出的。 为此,该文分析了这类方法的局限性,并基于原始数学模型研究了非线性轨迹跟踪控制问题。 通过期望轨迹建立跟踪误差模型,将其分解为两个相互独立的子系统,并以刚体旋转的四元数为系统状态对姿态子系统进行描述。 利用 backstepping 方法设计时变反馈控制律使其子系统指数稳定。 根据级联系统的全局稳定性判据,通过研究耦合部分的性质证明系统的全局指数稳定性。 仿真结果表明,该方法能够实现四旋翼无人飞行器对期望轨迹的跟踪。
近年来,无人飞行器(unmanned aerial vehicles, UAV)受到研究人员的广泛关注。 四旋翼无人飞行器由于能够垂直起降(vertical take-off and landing, VTOL)、自主悬停且机械结构简单而成为UAV研究领域中的热点[1] 。 然而,四旋翼无人飞行器是一个具有复杂约束方程的级联非完整系统,不满足Brockett关于光滑反馈镇定的必要条件,只有非光滑或时变的控制律才能使其稳定[2] 。 针对该飞行器的控制器设计问题,已提出了大量的研究方法[3-10] 。 文献[3-9]通过对系统模型进行不同程度的简化处理来简化控制器设计过程,但限制了以上控制方法的应用范围,且可能导致控制系统精度的降低甚至发散。 文献[10]在系统完整数学模型基础上进行控制器设计,但由于系统稳定性分析的复杂性,该文献并没有证明系统的全局稳定性。 由此可见,由于四旋翼无人飞行器的模型较为复杂,对于此类系统的理论研究还存在许多问题.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





