
资料下载


基于互补滤波器的四旋翼飞行器姿态解算
2877128716
分享资料个
针对小型四旋翼飞行器姿态解算这一基本问题,详细分析了姿态解算的过程,提出了其中的难点问题。应用低成本捷联惯性测量单元,设计了一种基于互补滤波器算法的姿态求解器。经过实验验证表明: 与目前常用的卡尔曼滤波算法相比,采用互补滤波器算法的求解器能显著降低对处理器速度和精度的要求,有效融合了捷联惯性测量单元的传感器数据,实现了小型四旋翼飞行器的高精度姿态解算。
小型四旋翼飞行器由于具有广阔的军事和民用前景,使其成为了当前的研究热点。其中,姿态解算是此类四旋翼飞行器研究的关键问题之一。姿态解算的精度和速度将直接影响飞行控制算法的稳定性、可靠性和实现的难易程度,所以,姿态解算是飞行控制实现的前提。随着 MEMS 技术和计算机技术的发展,小型飞行器姿态的测量普遍采用低成本的捷联惯性测量单元( inertial measurement unit, IMU) ,其主要由低成本陀螺仪、加速度传感器和电子罗盘组成。MEMS 陀螺仪具有温度漂移特性,加速度传感器会受到飞行器飞行过程中机体振动的影响,同时电子罗盘是一种磁阻传感器,容易受到外部磁场的干扰。因此,如何融合 IMU 多传感器的数据,滤除外部干扰,得到高可靠性、高精度的姿态数据,是一项非常具有挑战性的工作。
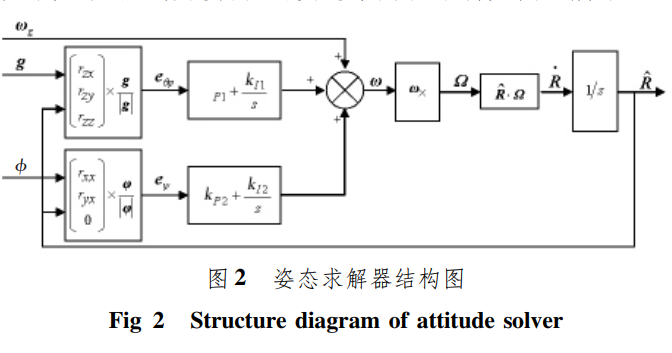
扩展卡尔曼滤波器算法是一种高精度的在飞行器中应用非常广泛的姿态解算算法,但是为其建立稳定可靠的更新方程是比较困难的,而且其计算量很大,对处理器的运算速度和精度要求很高,不适合应用于小型四旋翼飞行器的嵌入式微控制器( MCU) 中。互补滤波器算法简单可靠,对惯性器件的精度要求较低,在飞行器姿态解算中的应用愈加广泛。因此,本文设计了基于互补滤波器算法的四旋翼飞行器的姿态求解器,实现了长时间稳定地输出高精度姿态数据,满足了四旋翼飞行器飞行控制的要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




