
资料下载


用Arduino读取MPU9250传感器
h1654155957.9921
分享资料个
描述
MPU-9250 是目前市场上最先进的加速度计、陀螺仪和指南针组合小尺寸传感器之一。它取代了流行的 MPU-9150,降低了功耗,改善了陀螺噪声和罗盘满量程性能。它具有许多高级功能,包括低通滤波、运动检测甚至可编程专用处理器。
它内部包括 MPU-6500,其中包含一个 3 轴陀螺仪和一个 3 轴加速度计,以及AK8963 ,市场领先的 3 轴数字罗盘。MPU-9250 使用 16 位模数转换器 (ADC) 对所有 9 个轴进行数字化。
陀螺仪
陀螺仪是一种用于测量或保持方向和角速度的设备。以每秒度数(或弧度)为单位测量的角速度是单位时间内物体旋转角度的变化。
根据方向的不同,角速率测量分为三种类型:
- 偏航:从上方看物体时在平面上的水平旋转。
- 俯仰:从正面看物体时的垂直旋转。
- 滚动:从前面看物体时水平旋转。
加速度计
加速度计传感器是测量加速度的集成电路 (IC),加速度是每单位时间的速度变化。测量加速度可以获取物体倾斜度和振动等信息。
通常,g用作加速度的单位,相对于标准重力 (1g = 9.80665m/s2)。
磁力计
磁力计提供有关设备传感器检测到的磁场的信息,理论上可以暴露用户的位置。磁力计传感器测量所有三个物理轴(x、y、z)的磁场,单位为 μT(微特斯拉)。
绝对方向传感器是磁力计的常见用例之一,它代表地球平面的固定方向(固定到磁场矢量和重力矢量)。
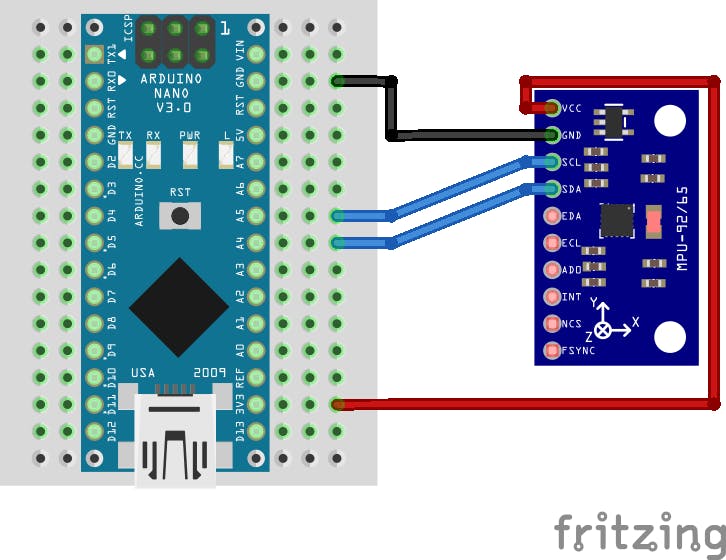
接线图
基本使用连接电源引脚和SDA 、SCL引脚,如下图所示:
解释数据
我们的官方存储库中有官方 MPU9250 数据表和寄存器图。它描述了 MPU-9250 中每个寄存器的功能和内容,包括磁力计。我们建议您阅读十进制、二进制和十六进制表示的帖子,以轻松识别寄存器并理解其中内容的含义。
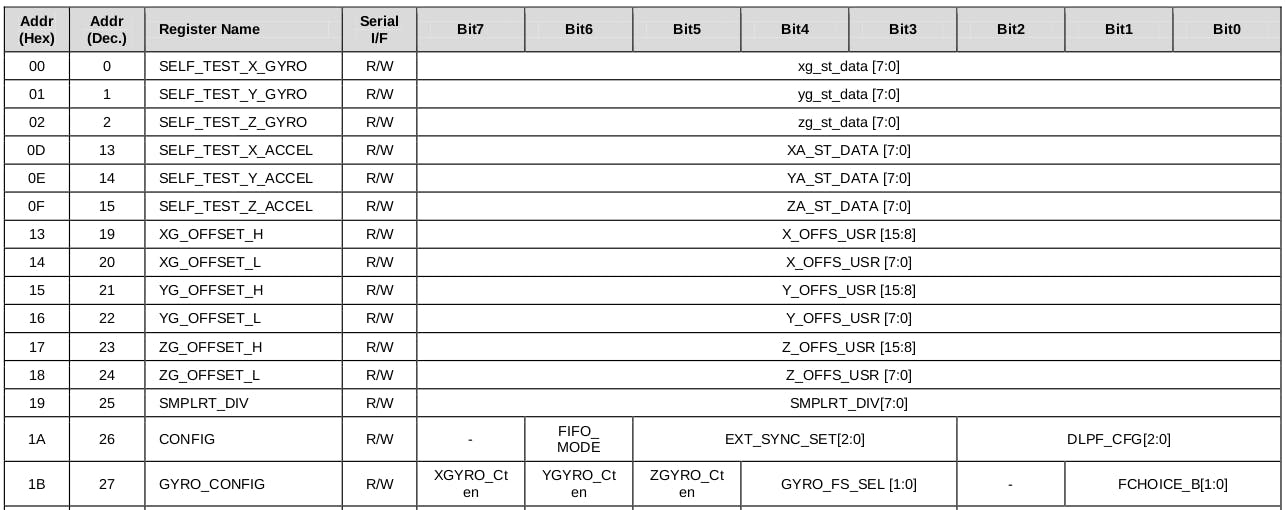
寄存器映射的前两列表示十六进制和十进制格式的地址,后跟寄存器名称。一些寄存器是只读的(用 R 标记),而另一些则允许我们写(用 R/W 标记)。寄存器的内容用 8 位表示。在各种情况下,寄存器的值可能代表不止一个东西,换句话说,每个位或位组可能具有不同的含义,例如GYRO_CONFIG(寄存器27)。
MPU-9250 的每个传感器都具有 16 位精度。这意味着使用两个 8 位寄存器来表示输出。我们将从每个寄存器中分别读取 8 位数据,然后将它们连接起来形成 16 位。
为 I2C 安装 Arduino 库
我们将使用 I2C 协议与寄存器交互并读/写数据。I2C 库为此目的提供了一个非常简单的接口,并且可以在使用 I2C 协议的其他项目中重用。它可以从我们的官方存储库中下载。
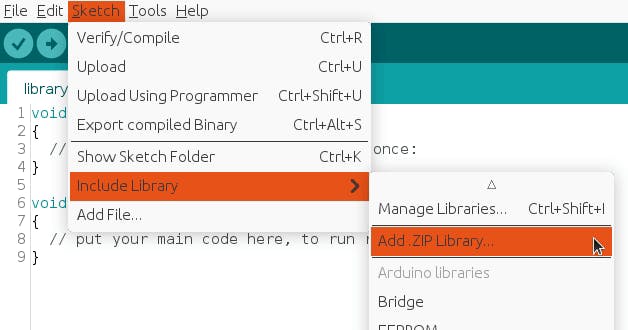
要导入库,请打开 Arduino IDE,转到 Sketch > Include Library > Add.ZIP Library,然后选择从我们的 GitHub 存储库下载的库文件。
然后你可以简单地使用include语句:
#include "I2C.h"
它将包含具有与寄存器交互的预定义函数的库。
Arduino代码
我们为每个原始传感器数据定义了一个单独的结构:gyroscope_raw 、accelerometer_raw 、magnetometer_raw和temperature_raw 。每个原始结构都有一个基于当前配置的数据规范化函数。人类可读的标准化值存储在另一个名为normalized的结构中。
确保遵循上一步并导入 I2C 库,以便将其与include语句一起使用:
#include "Wire.h"
#include "I2C.h"
#define MPU9250_IMU_ADDRESS 0x68
#define MPU9250_MAG_ADDRESS 0x0C
#define GYRO_FULL_SCALE_250_DPS 0x00
#define GYRO_FULL_SCALE_500_DPS 0x08
#define GYRO_FULL_SCALE_1000_DPS 0x10
#define GYRO_FULL_SCALE_2000_DPS 0x18
#define ACC_FULL_SCALE_2G 0x00
#define ACC_FULL_SCALE_4G 0x08
#define ACC_FULL_SCALE_8G 0x10
#define ACC_FULL_SCALE_16G 0x18
#define TEMPERATURE_OFFSET 21 // As defined in documentation
#define INTERVAL_MS_PRINT 1000
#define G 9.80665
struct gyroscope_raw {
int16_t x, y, z;
} gyroscope;
struct accelerometer_raw {
int16_t x, y, z;
} accelerometer;
struct magnetometer_raw {
int16_t x, y, z;
struct {
int8_t x, y, z;
} adjustment;
} magnetometer;
struct temperature_raw {
int16_t value;
} temperature;
struct {
struct {
float x, y, z;
} accelerometer, gyroscope, magnetometer;
float temperature;
} normalized;
unsigned long lastPrintMillis = 0;
void setup()
{
Wire.begin();
Serial.begin(115200);
I2CwriteByte(MPU9250_IMU_ADDRESS, 27, GYRO_FULL_SCALE_1000_DPS); // Configure gyroscope range
I2CwriteByte(MPU9250_IMU_ADDRESS, 28, ACC_FULL_SCALE_2G); // Configure accelerometer range
I2CwriteByte(MPU9250_IMU_ADDRESS, 55, 0x02); // Set by pass mode for the magnetometers
I2CwriteByte(MPU9250_IMU_ADDRESS, 56, 0x01); // Enable interrupt pin for raw data
setMagnetometerAdjustmentValues();
//Start magnetometer
I2CwriteByte(MPU9250_MAG_ADDRESS, 0x0A, 0x12); // Request continuous magnetometer measurements in 16 bits (mode 1)
}
void loop()
{
unsigned long currentMillis = millis();
if (isImuReady()) {
readRawImu();
normalize(gyroscope);
normalize(accelerometer);
normalize(temperature);
}
if (isMagnetometerReady()) {
readRawMagnetometer();
normalize(magnetometer);
}
if (currentMillis - lastPrintMillis > INTERVAL_MS_PRINT) {
Serial.print("TEMP:\t");
Serial.print(normalized.temperature, 2);
Serial.print("\xC2\xB0"); //Print degree symbol
Serial.print("C");
Serial.println();
Serial.print("GYR (");
Serial.print("\xC2\xB0"); //Print degree symbol
Serial.print("/s):\t");
Serial.print(normalized.gyroscope.x, 3);
Serial.print("\t\t");
Serial.print(normalized.gyroscope.y, 3);
Serial.print("\t\t");
Serial.print(normalized.gyroscope.z, 3);
Serial.println();
Serial.print("ACC (m/s^2):\t");
Serial.print(normalized.accelerometer.x, 3);
Serial.print("\t\t");
Serial.print(normalized.accelerometer.y, 3);
Serial.print("\t\t");
Serial.print(normalized.accelerometer.z, 3);
Serial.println();
Serial.print("MAG (");
Serial.print("\xce\xbc"); //Print micro symbol
Serial.print("T):\t");
Serial.print(normalized.magnetometer.x, 3);
Serial.print("\t\t");
Serial.print(normalized.magnetometer.y, 3);
Serial.print("\t\t");
Serial.print(normalized.magnetometer.z, 3);
Serial.println();
Serial.println();
lastPrintMillis = currentMillis;
}
}
注意:该片段是位于我们的 GitHub存储库中的 Arduino 项目的一部分,代码分隔在不同的逻辑文件中。
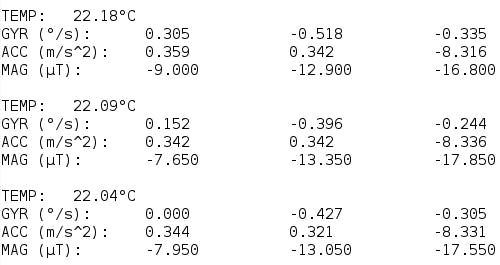
测试
串行监视器将每隔INTERVAL_MS_PRINT毫秒打印最后一次可用的传感器数据(在上面的示例中,每秒一次),它应该类似于:
通常方向是在物理模块上绘制的,因此您可以轻松检测 X、Y 和 Z 轴。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





