
资料下载


使用Arduino的基于RFID的访问控制系统
分享资料个
描述
在上一篇文章中,您了解了使用 Arduino 的基于 RFID 和键盘的门锁和警报系统,其中用户必须扫描正确的标签并输入正确的密码才能打开门锁,系统还会向我们发送确认消息。
在这篇文章中,您将了解如何使用 Arduino 构建基于 RFID 的访问控制系统。系统只允许扫描正确的标签和扫描错误的标签,系统将拒绝访问,并且蜂鸣器会发出哔哔声。将有一个主标签用于添加/删除其他标签。
模块断电后保存的标签仍会保留。重置系统的唯一方法是使用擦除按钮,该按钮将擦除 EEPROM 中的所有数据。EEPROM 大约有 100, 000 个有限的写入周期。
这是 RFID Arduino 系列的第四篇文章。RFID Arduino系列所有文章如下
- RFID 基础知识和与 Arduino 连接的 RFID 模块
- 使用 Arduino 的基于 RFID 和键盘的门锁
- 使用 Arduino 的基于 RFID 和键盘的门锁和警报系统
- 使用 Arduino 的基于 RFID 的访问控制系统
- 使用 Arduino 的基于 RFID 的访问控制和警报系统
- 使用 Arduino 的基于 RFID 和键盘的访问控制
- 使用 Arduino 的基于 RFID 和键盘的访问控制和警报系统
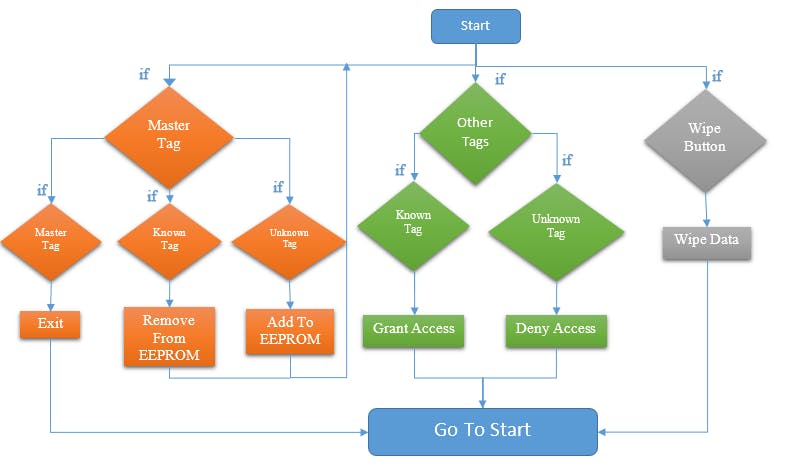
使用Arduino的基于RFID的访问控制系统的工作
第一次启动项目时,它会要求您定义一个主标签,您将扫描的任何标签都将是您的主标签。主标签将充当程序员,您可以使用它来添加或删除其他标签。
定义主标签后,您必须添加可用于开门的其他标签。为此,请扫描主标签,它将使系统进入程序模式。
在程序模式下,扫描标签将从系统中添加/删除这些标签。扫描您想用来开门的标签,系统会将这些标签的 UID 存储在 EEPROM 中。再次扫描标签以将其从 EEPROM 中移除。要退出编程模式,请扫描主标签。
现在扫描您在系统中添加的标签以打开门,扫描错误的标签时,门将保持关闭状态。
要重置系统,请按 Arduino 的重置按钮,然后长按擦除按钮 10 秒。这将从 EEPROM 中删除所有数据,包括主标签。
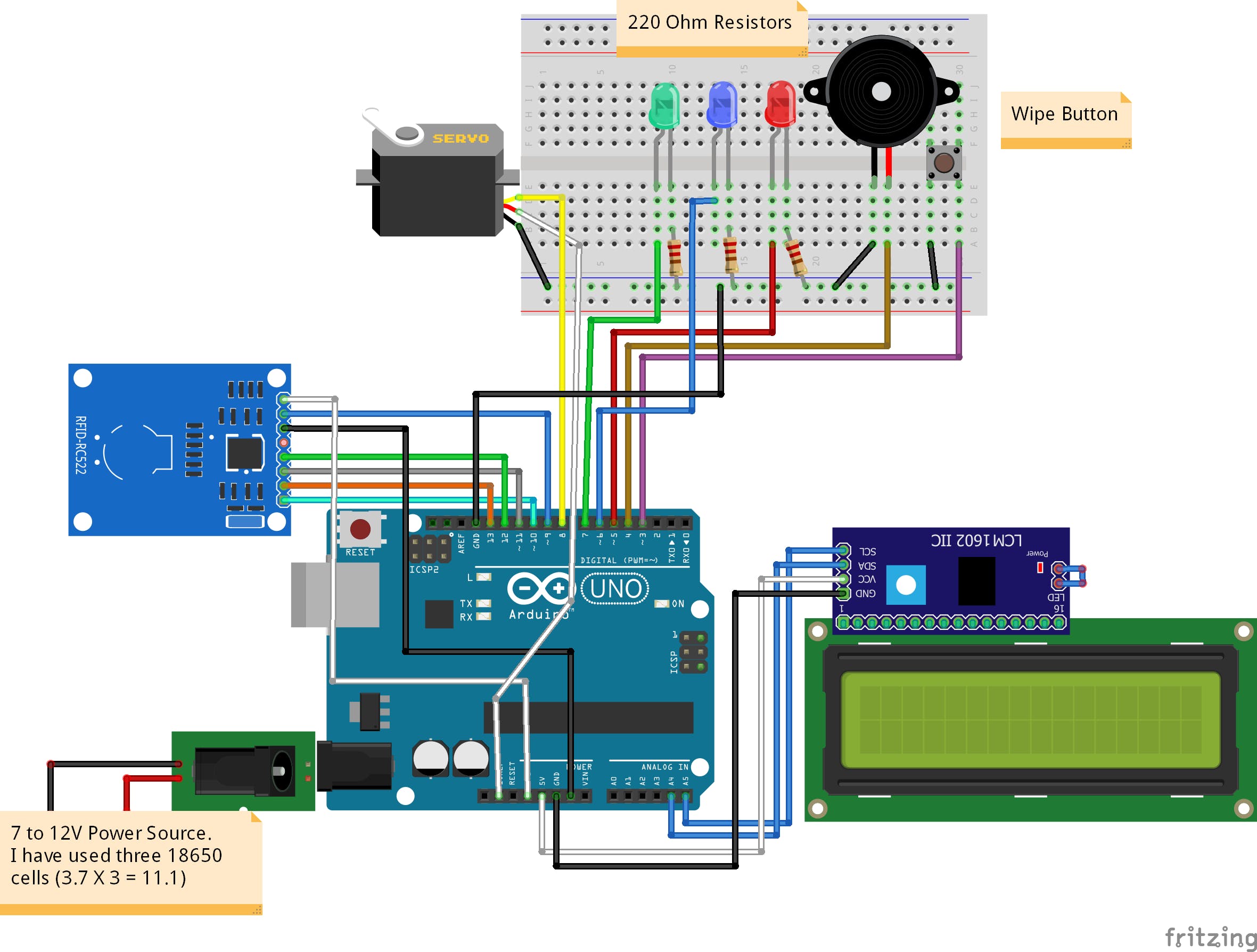
电路图及说明
RFID 阅读器通过 SPI 协议与 Arduino 通信,不同的 Arduino 板具有不同的 SPI 引脚。
要测试 RFID 阅读器是否正常工作,请上传 Arduino 中示例中的“dumpinfo”,看看它是否在串行监视器上显示标签的信息。如果您是 RFID 新手,请遵循本教程 | RFID 基础知识和与 Arduino 连接的 RFID 模块
I2C LCD 通过 I2C 协议与 Arduino 通信。不同的 Arduino 板具有不同的 I2C 引脚。Arduino Uno 和 Arduino Nano 上的 I2C 引脚是 A4、A5。
之后,将 Arduino 与伺服、LED、蜂鸣器和按钮连接起来。
最后,将电源连接到 Arduino。我用了三个 18650 电池。我们可以通过筒形千斤顶给 Arduino 提供 6 到 12V 的电压。
使用Arduino的基于RFID的访问控制系统的完整电路图如下
代码
下面的代码是 Miguel Balboa 编写的库中示例草图的修改版本。图书馆的链接如下
https://github.com/miguelbalboa/rfid
使用Arduino的基于RFID的访问控制系统的完整代码如下
#include // We are going to read and write Tag's UIDs from/to EEPROM
#include
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





