
资料下载


从头开始构建无人机
手托初梦
分享资料个
描述
注意:我还没有开始构建任何东西。在开始之前,我试图衡量对这个项目的兴趣,所以如果您有意见、建议、想法或鼓励的话,请在下面发表!
动机
你有没有想过无人机是如何工作的?
不仅仅是如何发送一些命令来移动无人机,还有无人机是如何建造的,从电路、控制这些嵌入式系统的低级固件,一直到可以绘制出图表的高级行为控制让无人机跟随并协调所有硬件系统来完成这项任务。
该项目的目标是从头开始构建无人机(硬件、固件和高级软件)。每个关键模块都将进行面包板测试和编程(固件)。然后将每个模块转换为 Arduino 的 PCB 屏蔽板,然后将其组装成工作无人机!最后,该项目将开发高级逻辑,将硬件系统连接在一起,形成一个功能齐全的无人机,可以飞行并从遥控器接收命令。
什么是 BareMetalDrone?
BareMetalDrone 是一款由 Arduino Uno 驱动并从头开始构建的四轴飞行器。
该项目将构建完成完整工作无人机所需的模块。计划是对每个模块进行面包板和编程,然后将每个模块制造为 Arduino 的 PCB 屏蔽。这篇文章将随着每个模块的设计和制造而更新。
对于任何有兴趣的人,我很乐意向您发送说明,教您如何对每个模块进行面包板和编程,并以成本价向您发送完成的 PCB 屏蔽。如果您对此感兴趣,请发送电子邮件至 austin@cirkitdesign.com。
BareMetalDrone 内部有哪些模块?
需要强调的是,目前还没有为 BareMetalDrone 建造任何东西。我试图在开始之前评估对项目的兴趣,所以我整理的图表和计划是非常初步的,可能不完整或包含错误。
这是将为该项目构建的模块的暂定计划:
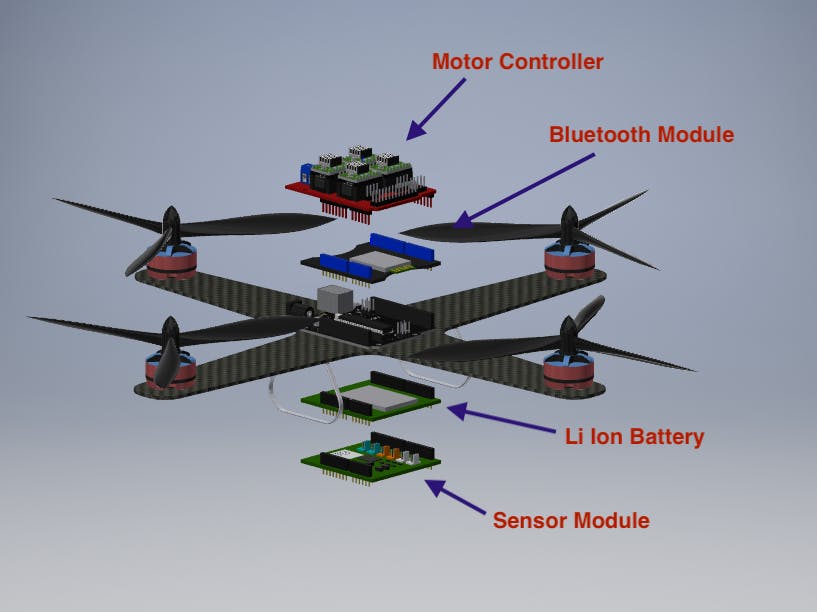
锂离子电池模块
锂离子电池护罩将为整个项目提供动力,包括无刷电机。尚未对所需的电池容量进行计算,因此电池最终可能比此处描述的大得多。
蓝牙模块
该四轴飞行器将由手机应用程序或遥控器供电(尚未确定)。蓝牙模块对于控制无人机至关重要。
该项目不会使用现成的蓝牙屏蔽。取而代之的是,蓝牙模块将从头开始制作面包板,然后制作成 PCB 屏蔽板。该项目还将通过从头开始编写 Arduino 与此蓝牙屏蔽的通信来工作。
传感器屏蔽
无人机将需要一些传感器测量来控制倾斜、高度和位置。我们可能需要加速度计和陀螺仪,但可能需要更多传感器。
这个盾牌编程起来特别有趣。该程序将需要有意义地解释所有传感器数据,以确定无人机的位置、方向和速度。
电机控制器
电机控制器需要将来自 Arduino 的包含电机命令的低电流信号转换为可以驱动四个无刷电机的高电流信号。
控制这些电机来平衡和导航无人机肯定是一项具有挑战性的任务。肯定会涉及到一些数学推导来弄清楚这个模块。
无刷电机
最后,该项目将对无刷电机进行面包板测试,以了解它们如何连接到电机控制器/Arduino。
主要的 Arduino 逻辑
除了实现低级代码以使模块正常工作外,该项目还将构建高级行为逻辑,以便无人机真正飞行!
该项目将从简单开始,目标是让无人机起飞、垂直升起和着陆而不会坠毁。但是我们可以通过对无人机进行编程使其水平移动,并按照 3D 路线返回家中,从而变得更加雄心勃勃。
软件的开发范围实际上并没有太大的限制。将来,可以开发一个 GPS 模块,这样无人机就可以穿越航路点。可以连接一个摄像头,这样无人机就可以利用计算机视觉。甚至可以连接机械臂,这样无人机就可以拿起和运送包裹!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





