
资料下载


如何从头开始制作六足机器人
贾大林
分享资料个
描述
描述
介绍
大家好!本文的目的是解释如何从头开始制作六足机器人。机器人将能够进行各种运动,并且能够在不平坦的地形上保持身体平衡(保持身体在水平面上)。让我们将整个项目分为 3 个主要部分:
- 机械方面
- 硬件
- 软件
并详细了解所有 3 个。
机械方面
为了组装机器人的底盘,我们使用了木头、有机玻璃和金属支架。让我们从主机开始,我们用木头和激光切割机制作机身的上下部分,然后用金属支架将它们连接起来(黑色的带有伺服和我们自己制作的银色)。

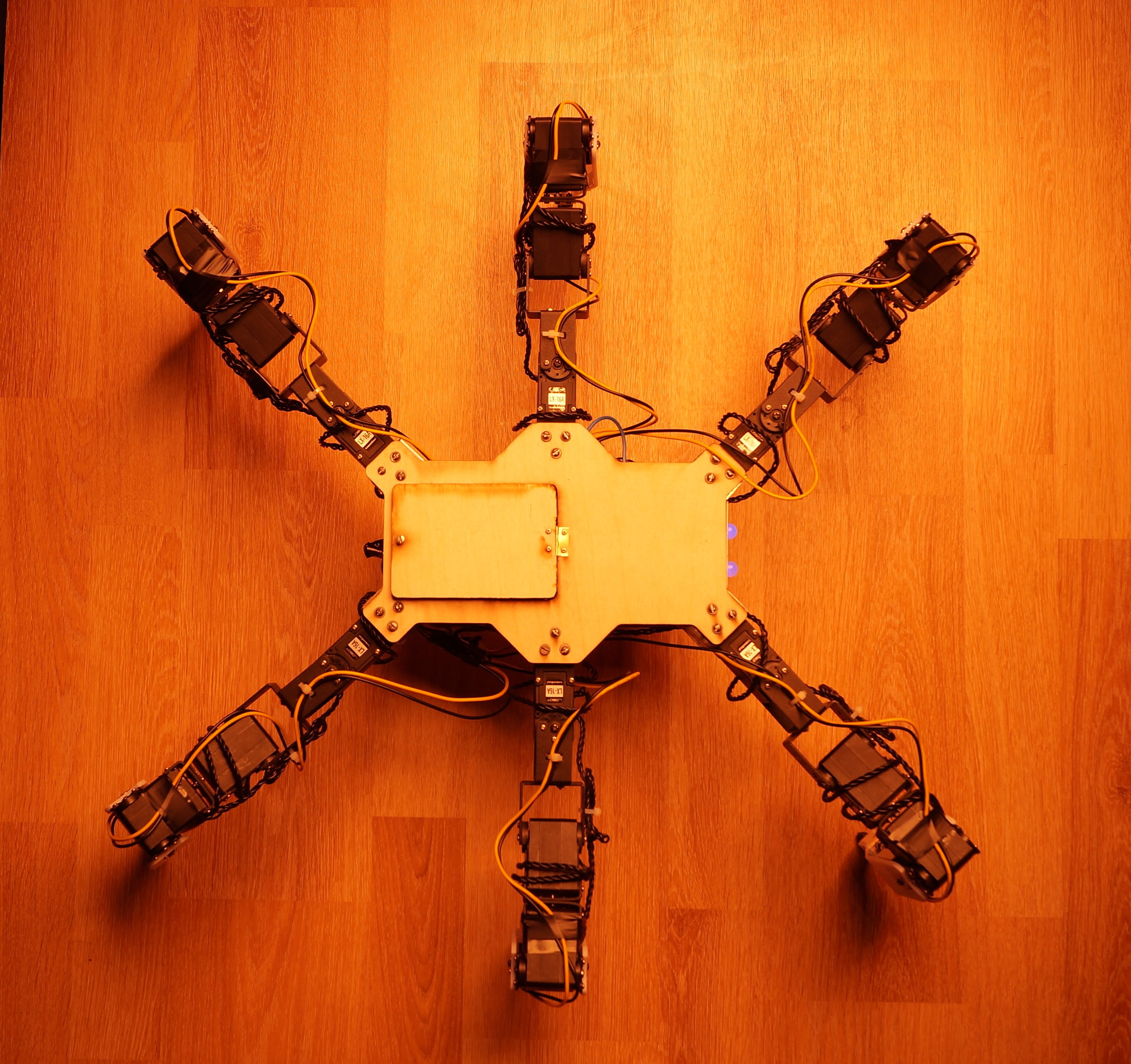
为了制作腿,我们使用支架连接了 3 个舵机。它的一端连接到主机,另一端连接到有机玻璃。玻璃也是用激光切割的,之后我们使用热风枪将其弯曲(见下面的过程),使其具有弯曲的形状。弯曲后,我们用木块和胶水连接了两个部分。
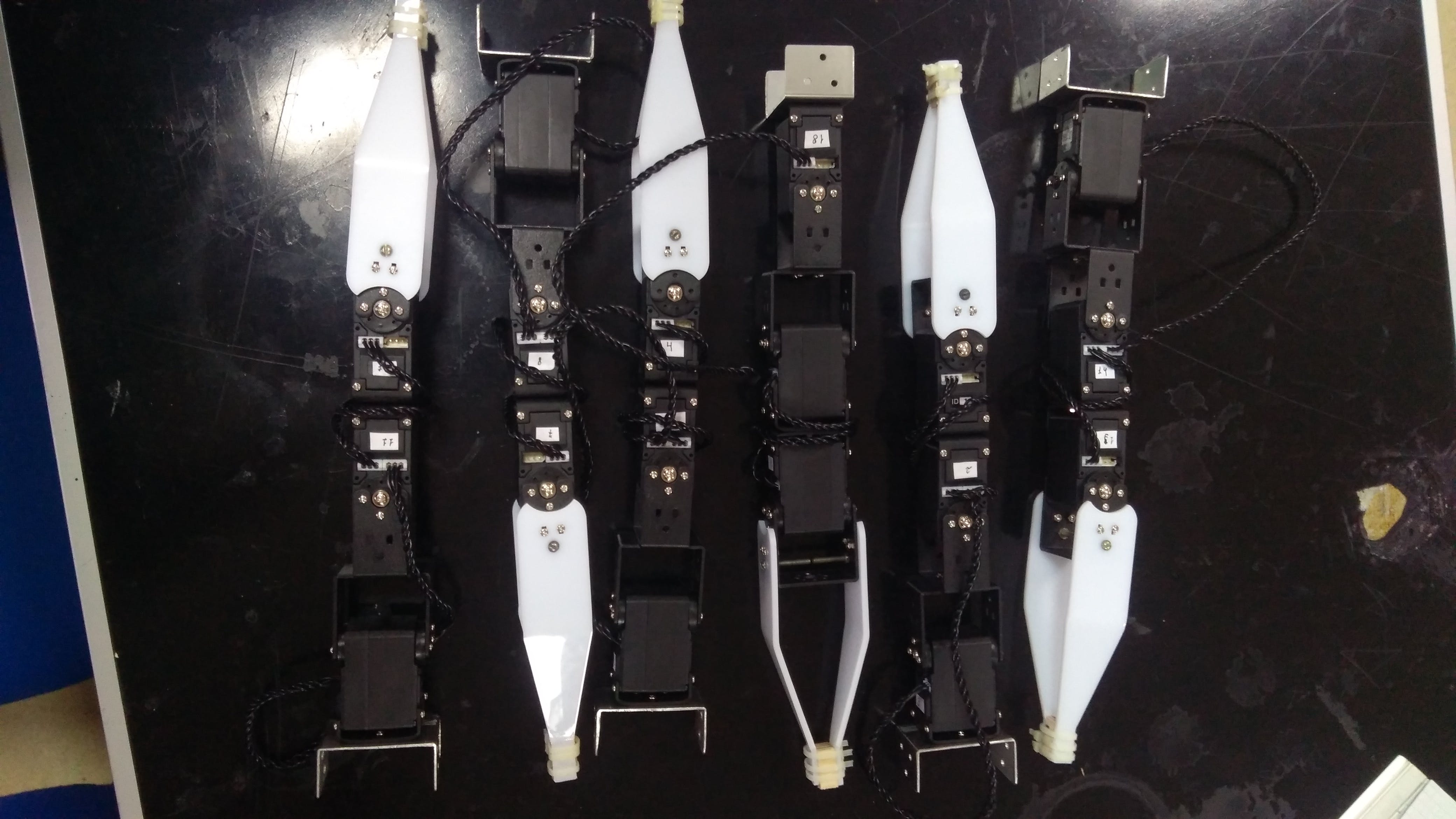
步数检查
为了检测机器人在行走过程中何时触地,我们在每条腿上添加了微动开关。开关连接在定制的支架上。我们在连接腿的两个部分的木头上钻孔,并在其中插入金属杆和弹簧。杆的地面部分涂有聚氨酯(这增加了地面的摩擦力,使机器人更加稳定),杆的上部连接到微动开关,当腿接触地面时按下。
硬件
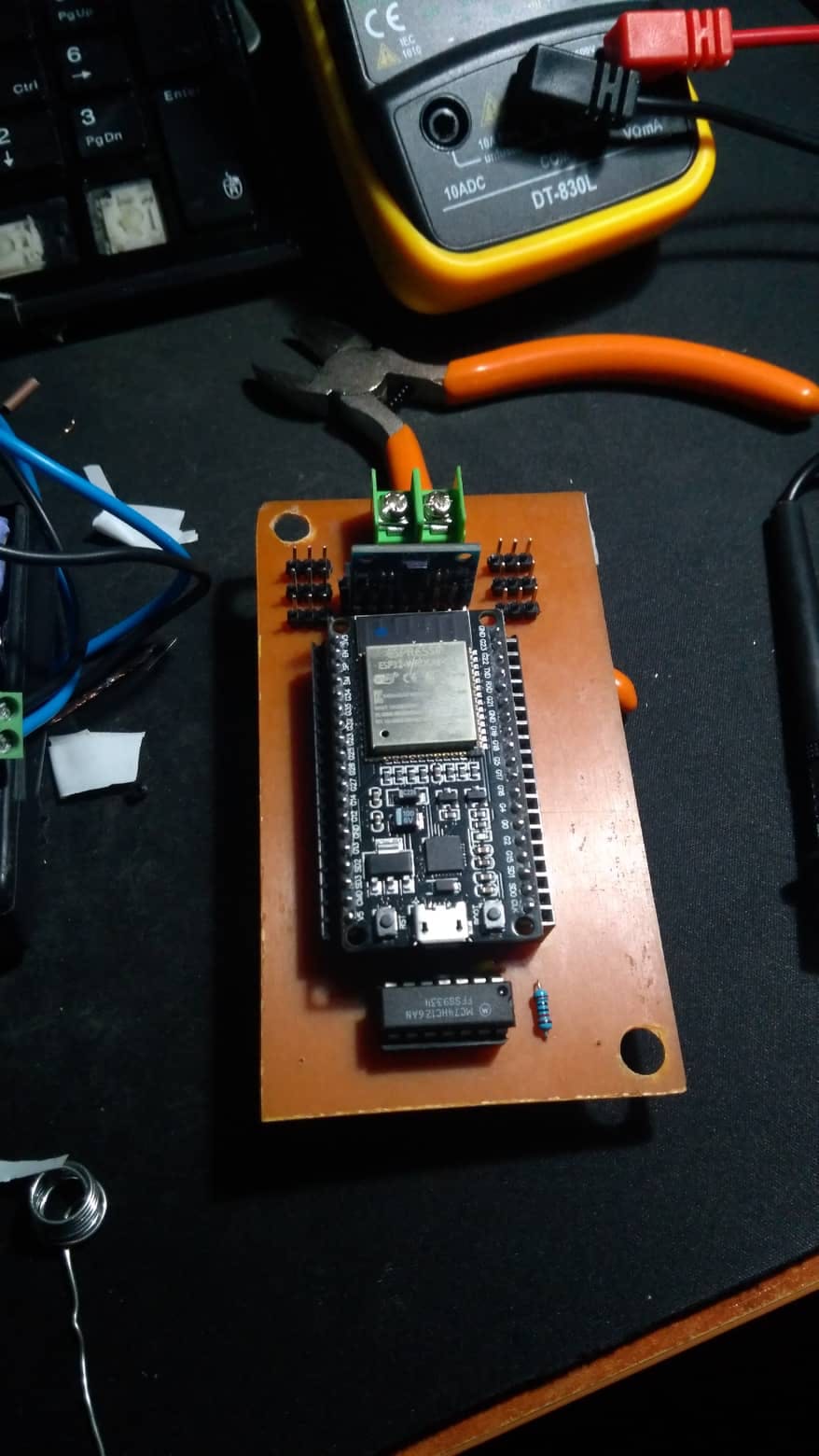
主板_
我们创建了支持与 esp32、mpu-6050 和伺服电机连接的电路板。我们在这个项目中使用的伺服器使用半双工 UART 与微控制器进行通信,以实现这种类型的通信,我们使用了 74hc126、晶体管和几个电阻器(用于非门)。
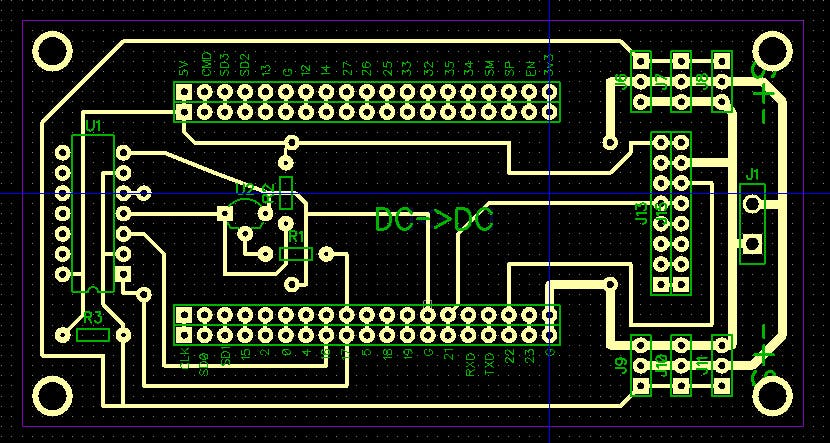
力量
电路板从伺服电机的输入接收平均 7.4V 电压,之后使用 dc->dc 转换器将电压降低到 5v 以供应电路的其他组件(esp32,mpu-6050 ...)。为了提供这种电力,我们使用了 4 节 3.7v 锂电池并将它们连接到小充电板上,如下所示:

电池连接到充电端口和开关,为主板供电。
软件
您可以使用 Arduino IDE 或平台 IO 编译并上传代码到微控制器。代码用 C++ 编写,分为几个库,允许用户通过仅更改相应的库文件来替换项目的某些部分。请注意,代码仍在进行中,因此并不完美。
我们使用手机与 esp32 使用专门为此项目创建的蓝牙应用程序连接。它使用户能够移动机器人并在几种模式之间切换。它还输出伺服电机中存在的电压,这是良好的电池指示器(8.4v - 完全充电,6.4v - 放电)。
平衡
机器人正在使用 PID 库将其身体保持在水平面上,您可以看到这个过程如下所示:
结论
这个项目花了我 1 年时间完成,但离完美还很远。它仍在进行中,因此代码将得到更新。如果你们中的任何人对机器人技术感兴趣,那么您应该会发现这篇文章很有趣,因为它基本上将整个问题划分为更小的问题,您可以将这些问题单独用于您的项目。如果您有任何问题,请写信给我。
祝你好运!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





