
资料下载


家用自动油箱加注可实现电机自动化
h1654155275.6473
分享资料个
描述
介绍:
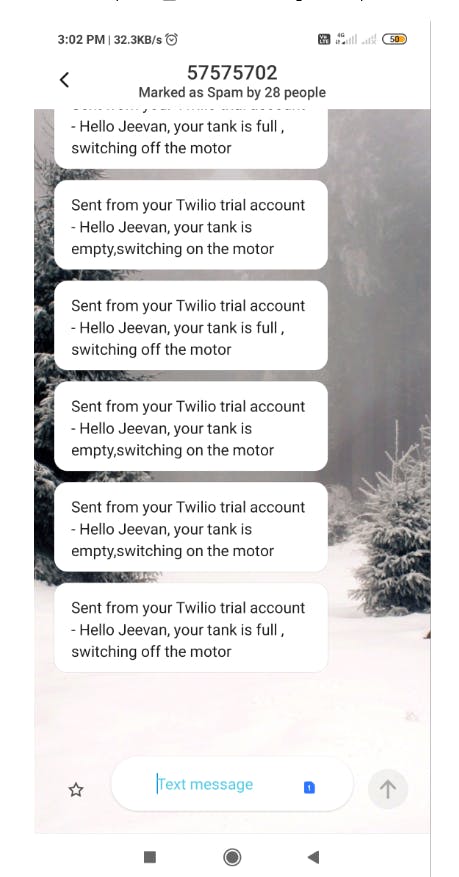
家用自动油箱加注可帮助您实现电机自动化,并在油箱达到阈值水平时给油箱加水,并在油箱装满后关闭电机。在此过程中向您发送消息,提示您打开和关闭电机。
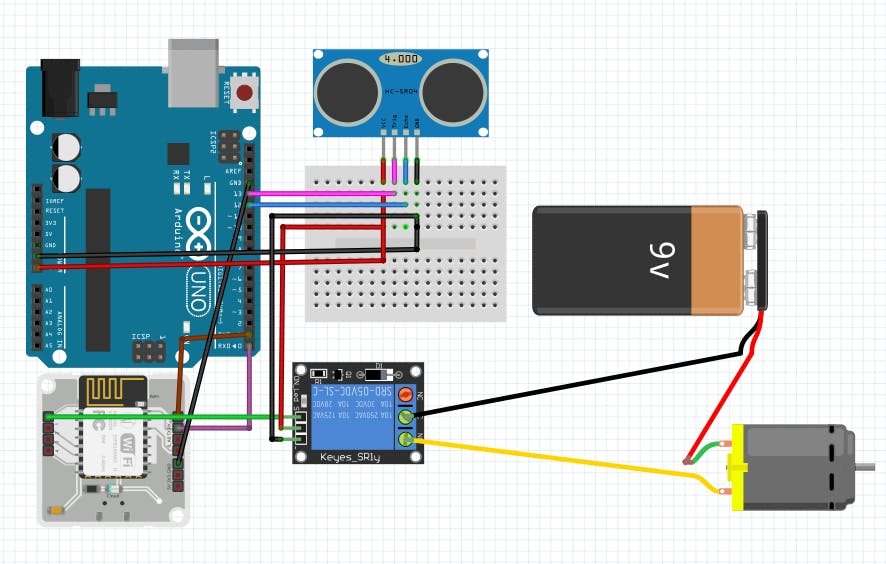
固定在水箱顶部的声波传感器测量水位并将信息发送到螺栓。每当水位达到阈值时,Bolt 会向继电器发出信号以打开电机,并向您发送消息“水位已达到阈值,打开电机”。当水箱已满时,传感器持续监测水位,将水位持续发送到 Bolt,Bolt 发出关闭电机的信号,并向您发送消息“水箱已满,关闭电机”。
硬件设置:
查找水位和控制电机:
软件设置:
通常,连接超声波传感器并不是一件容易的事,因为需要按照上面链接的 Dejan 的博客中解释的功能方式使用它。然而,Erick Simoes 的 Ultrasonic库(可从 Arduino Library Manager 获得)通过抽象出核心实现大大简化了事情。
在 GitHub 上查看基本硬件连接以及库的基本结构和用法说明。
https://github.com/ErickSimoes/Ultrasonic
下面链接的 Arduino 代码使用超声波传感器测量距离,然后通过串行通信将其发送到 Bolt Wi-Fi 模块。
Python 脚本(例如,在服务器或您的 PC 上运行)使用 Bolt Python 库查询 Bolt 云以获取此距离值,该库又基于用于串行读取的 Bolt 开放 API。
Python 脚本然后检查距离是否大于阈值。如果大于该值,则启动电机,使用Twillio SMS 服务发送 SMS 警报。当 油箱充满时,它会关闭电机,并发送短信警报。
示范:
脚步:
- >在您的PC上安装python中的螺栓库。
- >在您的 PC 上安装 Arduino IDE。
- >现在将 Arduino 的代码复制/下载到 Arduino IDE 中。
- > 下载 python 代码。
- >按照上图所示进行连接。
- >通过查看 LED 检查每个模块是否正常工作。
- >从 Arduino IDE 将代码上传到 Arduino 中。
- >运行python代码。
Ardunio 读取的传感器值和 Bolt 通过串行读取获得的传感器值会有延迟,由于 Ardunio 将每个传感器值保存在寄存器中并串行输出,并且程序在不同的时间启动,因此会请求不同的值(如果我们从 Bolt 发出一些触发信号,然后 Ardunio 感知价值,然后立即发送给 Bolt,那将很有帮助)
你可以看到当没有障碍物时电机开始旋转,当我们将障碍物靠近传感器时电机停止旋转。
这是一个原型,因此您可以代替直流电机来固定电机泵,并代替电池提供交流电源。在执行此操作之前,请参阅继电器规格。并将传感器固定在头顶水箱上,使其指向水。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






