
资料下载


使用Zio模块控制机械臂(第4部分)
李春梅
分享资料个
描述
这篇博文是Zio 机器人系列的一部分。
介绍
这是“用 Zio 控制机械臂”帖子的最后一部分。在本教程中,我们将向机械臂添加另一个部件。以前的教程不包括用于手臂旋转的底座。
您可以在下面查看其他系列的教程:
目录
- 难度级别
- 有用的资源
- 硬件
- 软件
一、项目概况
难度级别:
齐奥学徒
有用的资源:
您应该对如何安装 Zio 开发板有基本的了解。在本教程中,我们假设您的开发板已经配置好并准备好进行设置。如果您还没有配置您的开发板,请查看下面的 Zio Qwiic 入门指南教程以开始使用:
硬件:
- Zio Zuino M UNO
- Zio 16 伺服控制器
- Zio DC/DC 升压器
- 3.7V 2000mAh电池
- 机械臂
软件:
电缆和电线:
- 200mm Qwiic 电缆
- 公对母跳线
2.原理图
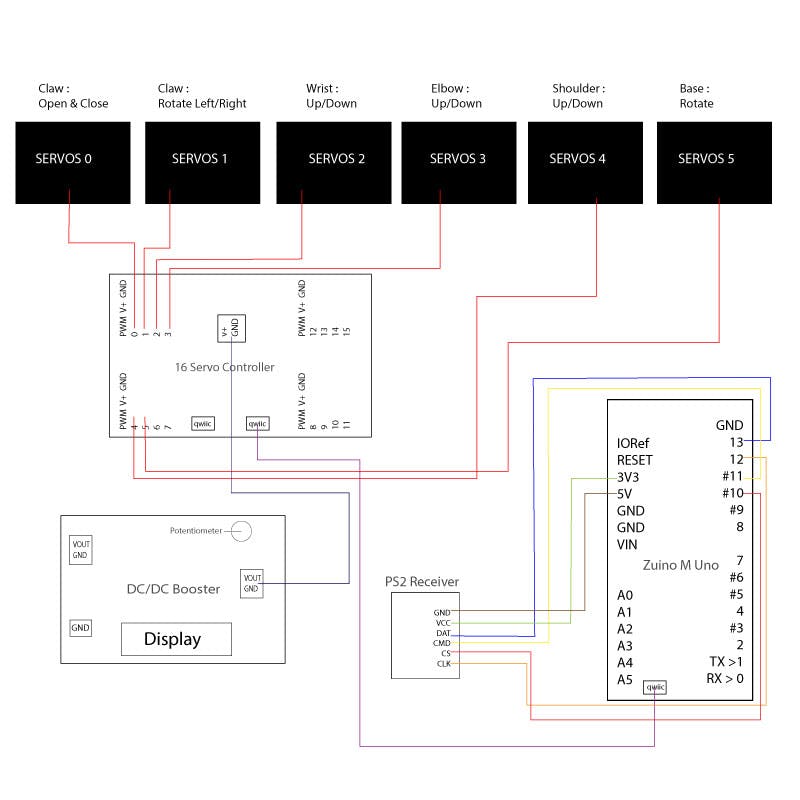
下面是机械臂第 4 部分项目的接线示意图
3.机械臂代码
我们将使用 PS2 Arduino 库对我们的 PS2 无线控制器进行编码,以便与我们的机械臂配合使用。您可以在我们的Github页面上找到并下载此机械臂第 2 部分项目的源代码。
安装库
下载并安装以下库并将其保存在本地 Arduino IDE 库文件夹中:
要安装库,请打开您的 Arduino IDE,转到 Sketch 选项卡,选择 Include Library -> Add.Zip Library。选择要包含在您的 IDE 中的上述库。
Arduino 有一个关于如何将库安装到 Arduino IDE 的便捷指南。在这里检查它们!
下载源代码
打开 Arduino IDE
在此处下载该项目的代码。
运行你的代码。
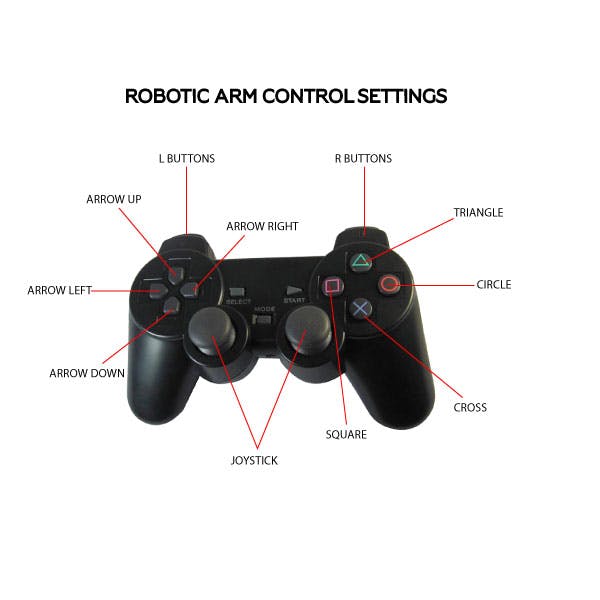
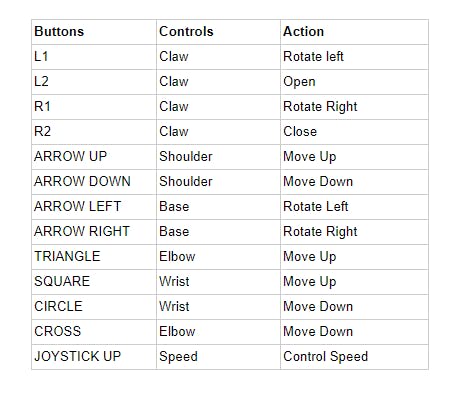
4. 机械臂控制设置
注意:在使用 PS2 控制器控制机械臂之前,请检查以下步骤:
- 打开你的 PS2 控制器。检查模式 LED 是否亮起。如果没有,请按控制器上的模式按钮。
- 完成上述操作后,您需要按下 Zuino M Uno 上的重置按钮,它才能读取您的控制器设置。
而已!您现在可以使用 Zio 模块通过 PS2 控制器控制机械臂。
有问题或建议吗?还是只是想和我们打个招呼?在下方给我们留言!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



