
资料下载


具有人体检测功能的智能监控系统开源
刘辉
分享资料个
描述
目录:
一、简介
2. 使用的硬件
3. 使用的软件
4. 编程语言
5. 工作流程
6. 障碍
使用 WizFi360 开发板设置 ARDUCAM
电报 API 连接
设置 YOLOV5
7.输出
八、结论
9. 参考资料
一、简介:
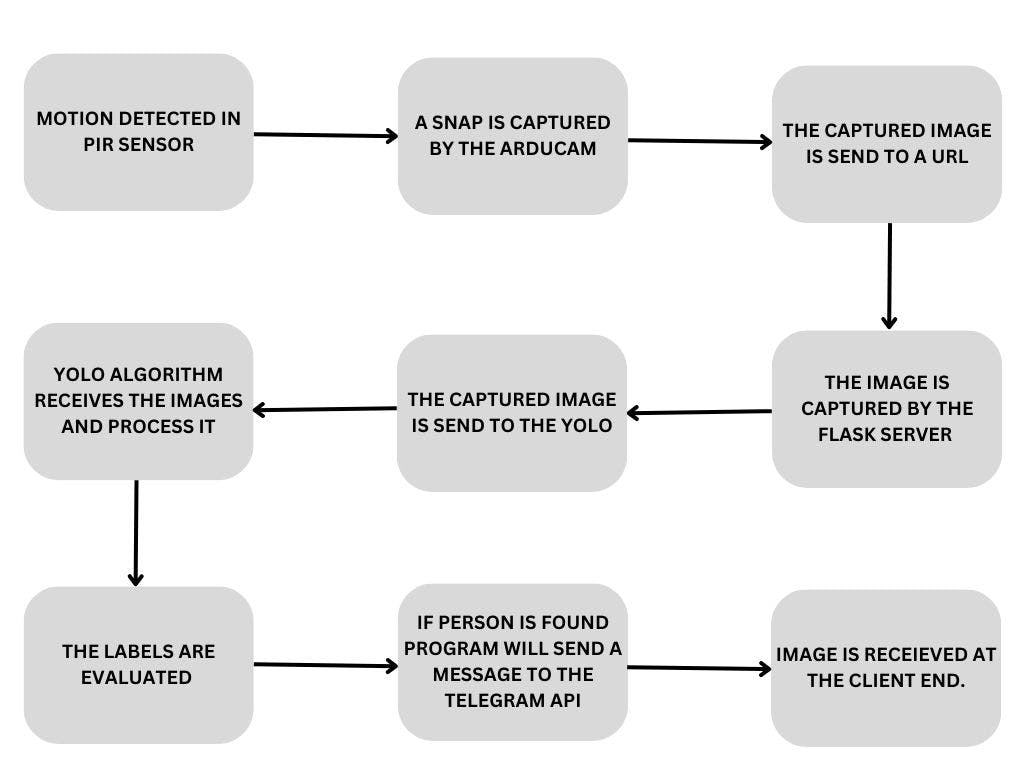
Smarter Surveillance System 项目旨在使用 WizFi360 板、Arducam Mini 2MP Plus 和 PIR 传感器创建智能监控摄像头。该系统旨在使用 PIR 传感器检测运动并使用 Arducam 相机捕捉人的图像。然后将捕获的图像发送到在后台运行的 Flask 服务器,以使用对象检测算法 YOLOv5 进行处理。构建更智能的监控系统的第一步是收集必要的硬件组件。对于这个项目,我们将使用 WizFi360 板、Arducam Mini 2MP Plus 和 PIR(被动红外线)传感器。这些组件将协同工作以检测运动、捕获图像并将其发送到 Flask 服务器进行处理。WizFi360 开发板是一款功能强大的物联网模块,可提供 WiFi 连接并支持各种无线协议,如 TCP/IP、HTTP、FTP 和 SSL/TLS。它有一个板载处理器,可以使用 Arduino IDE 轻松编程,使其成为物联网应用的理想选择。
Arducam Mini 2MP Plus 是一款分辨率为 2 兆像素的小型相机模块。它支持多种接口,包括SPI、I2C和UART,可以轻松连接到WizFi360板。PIR 传感器是一种运动检测传感器,可检测移动物体发出的红外辐射的变化。它通常用于安全系统,可以检测到几米远的运动。如果在捕获的图像中检测到人,系统会向 Telegram 频道发送通知,表明有人在禁区内。通知包括检测到的图片,允许快速响应和操作。总体而言,Smarter Surveillance System 是一种创新且高效的方式,可以利用最新的可用技术来监控和保护禁区。
2. 使用的硬件:
WizFi360-EVB-Pico
跳线
ARDUCAM 迷你 2MP 加
红外传感器
3. 使用的软件和服务:
YOLOv5
AURDINO IDE
烧瓶问
4. 编程语言
C++
PYTHON
5. 工作流程:
设置硬件组件
第一步是设置硬件组件。使用 SPI 接口将 Arducam Mini 2MP Plus 相机模块连接到 WizFi360 板。将 PIR 传感器连接到 WizFi360 板的数字引脚之一。将电源连接到 WizFi360 板上。
配置 WizFi360 开发板
配置WizFi360开发板连接WiFi网络。使用 Arduino IDE 对电路板进行编程,以与 Arducam 相机模块和 PIR 传感器通信。设置电路板以在 PIR 传感器检测到运动时捕获图像。
捕捉图像
当 PIR 传感器检测到运动时,WizFi360 板会触发 Arducam 相机模块捕捉图像。捕获的图像保存在 WizFi360 板的内存中。
将图像发送到 Flask 服务器
WizFi360 板被编程为使用 HTTP POST 请求将捕获的图像发送到 Flask 服务器。Flask 服务器在后台运行,等待接收图像。
使用 YOLOv5 处理图像
一旦 Flask 服务器收到图像,它就会使用 YOLOv5 算法处理图像。YOLOv5 是一种目标检测算法,可以高精度地实时检测目标。Flask 服务器被编程为在捕获的图像上运行 YOLOv5 算法以检测图像中是否有人。
向 Telegram 发送通知
如果在图像中检测到人,Flask 服务器会生成通知并将其发送到 Telegram 频道。该通知包括一条消息,指示有人在受限区域,以及检测到的图像。
采取行动
一旦在电报频道上收到通知,就可以采取适当的行动,例如提醒安全人员或发出警报。
6. 障碍:
1. 使用 WizFi360 开发板设置 ARDUCAM
下面显示了带有 Arducam 的 WizFi360 的整体设置。下面还给出了引脚配置:

WizFi360 是一款紧凑而强大的 Wi-Fi 模块,可提供与物联网 (IoT) 设备的无缝连接。它具有低功耗 ARM Cortex-M4 微控制器和支持 IEEE 802.11 b/g/n 协议的高性能 Wi-Fi 收发器。凭借其内置的安全功能和易于使用的软件开发套件,WizFi360 是创建智能互联物联网应用程序的理想解决方案。另一方面,PIR(被动红外线)传感器是一种运动传感器通过感应红外辐射水平的变化来检测运动。它通常用于安全系统、自动照明和其他需要运动检测的应用。PIR 传感器被称为“无源”,因为它们本身不发射任何能量;相反,它们检测其他物体发出的能量,
结合使用时,WizFi360 和 PIR 传感器可以创建功能强大且智能的物联网应用程序,从而实现对运动检测系统的远程监控和控制。例如,PIR 传感器可以检测房间内的移动并向 WizFi360 模块发送信号,然后该模块可以向智能手机应用程序发送通知或触发警报。WizFi360 还可用于控制 PIR 传感器的灵敏度和工作模式,使其成为适用于广泛物联网应用的灵活且可定制的解决方案。
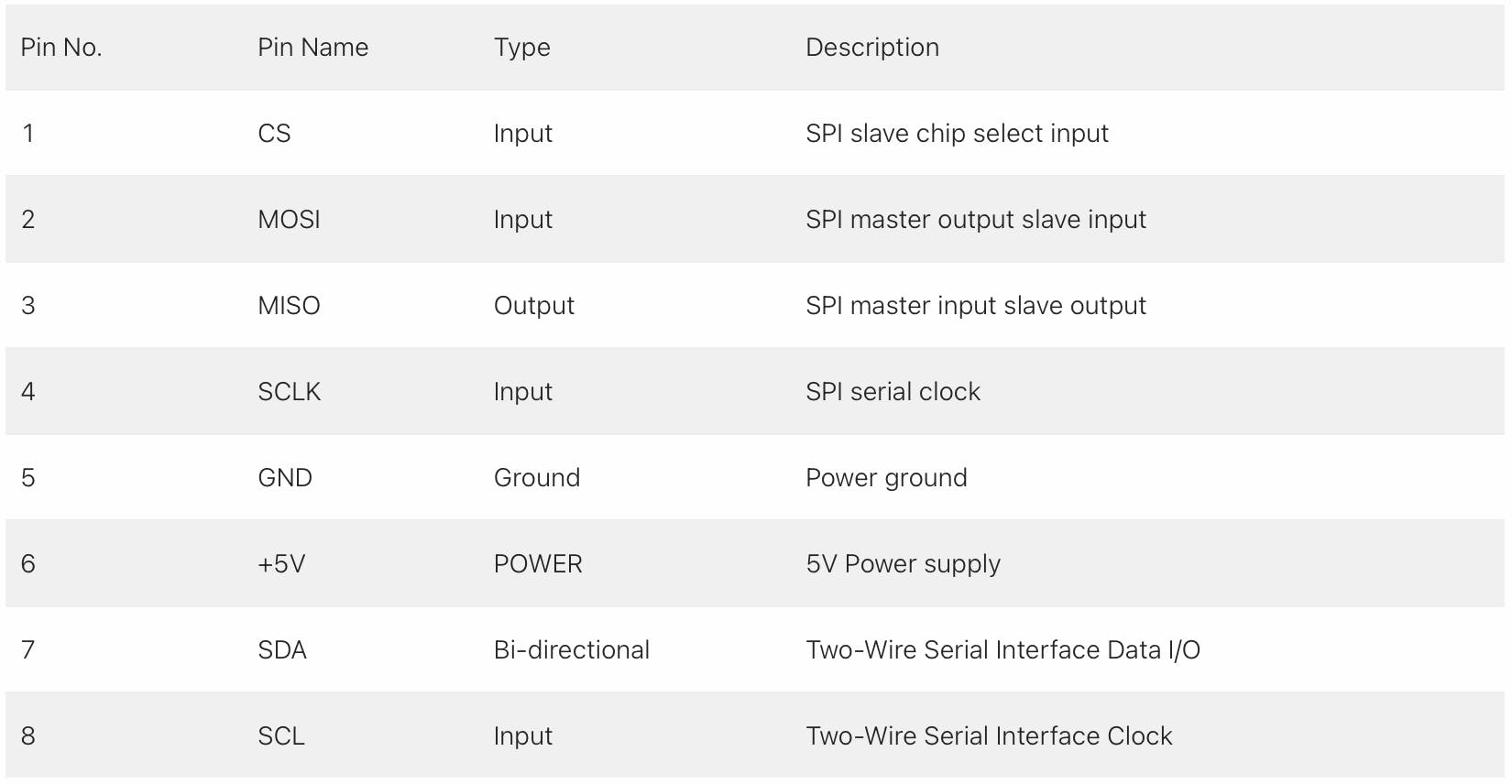
ArduCam为 Raspberry Pi Pico 提供文档和源代码 SPI Camera ,它也使用 SPI0。为避免冲突,该项目将 SPI1 用于 ArduCam OV2640 模块。ArduCam OV2640 模块需要 CS、MOSI、MISO、SCLK 引脚用于 SPI 连接,SDA、SCL 引脚用于 I2C 连接。该项目修改了 ArduCam 的源代码以使用 SPI1。
ArduCam OV2640 的 Pico 引脚配置
1. CS --> GPIO 13
2. MOSI --> GPIO 11
3. 味噌 --> GPIO 12
4. SCLK --> GPIO 10
5.SDA --> GPIO 8
6. SCL --> GPIO 9
代码说明
WizFi_Flask 服务器/WizFi_CamPost.ino
setup():该函数在Arduino板子上电或复位时调用一次。它以 115200 的波特率初始化串行通信,并通过调用 ArduCam_setup() 函数初始化 ArduCAM 模块。
loop():这个函数在setup()函数之后被重复调用。它使用 ArduCAM 模块捕获图像,使用 Wi-Fi 模块将图像数据发送到服务器,然后等待一段时间再重复该过程。
ArduCam_setup():此函数通过将 CS 引脚设置为输出并初始化用于 I2C 通信的 Wire 库来初始化 ArduCAM 模块。
ArduCam_sendImg():此函数使用 ArduCAM 模块捕获图像并将图像数据存储在 img_buf 数组中。然后它调用 http_postData() 函数将图像数据发送到服务器。
http_postData(字节 *buf,uint32_t 长度):
此函数使用 Wi-Fi 模块将图像数据发送到服务器。它首先检查客户端是否连接到服务器,如果没有,它会在放弃之前尝试重新连接几次。然后,它将图像数据作为负载发送到服务器的 HTTP POST 请求。有效负载包括图像的文件名和内容类型。最后,它在关闭连接之前等待服务器的响应。
buffer_transfer(byte *bptr, size_t len):此函数以多个大小为 max_transfer(此代码中为 1024 字节)的块向服务器发送数据缓冲区,以防止缓冲区溢出。
client:WiFiClient类的这个对象,用于与服务器建立连接,发送/接收数据。
2. 设置电报 API
打开 Telegram 并搜索 BotFather 用户。
开始与 BotFather 对话并输入 /newbot。
按照提示为您的机器人命名和用户名。
创建机器人后,BotFather 将向您发送一条包含机器人令牌的消息。令牌是一长串字符,可唯一标识您的机器人,并且需要对 API 请求进行身份验证。
将机器人的令牌保存在安全的地方,因为您将需要使用它与 Telegram Bot API 进行交互。
有关更多信息,请单击链接。
3. 设置 YOLO
YOLOv5(You Only Look Once version 5)是由 Ultralytics 开发的一种最先进的实时对象检测算法。YOLOv5 通过引入新的模型架构和训练过程建立在其前辈的成功之上,从而显着提高了准确性和速度。该架构由骨干网络(CSPDarknet53)、颈部网络(SPP)和头部网络(YOLOv5)组成。CSPDarknet53 网络使用一种新颖的跨阶段局部网络来增强层之间的信息流,从而改进特征表示。SPP 网络结合了空间金字塔池化,这使得网络能够更好地捕获不同尺度的对象。YOLOv5 头部网络使用锚框和分类和回归层来检测和定位图像中的对象。
脚步:
安装Git:如果您的系统上没有安装Git,请从官方网站下载并安装它: https: //git-scm.com/downloads。
克隆 YOLOv5 存储库:打开终端窗口并导航到要存储 YOLOv5 代码的目录。然后运行以下命令:
git 克隆https://github.com/ultralytics/yolov5.git
安装依赖项:导航到“yolov5”目录并运行以下命令来安装 YOLOv5 所需的依赖项:
pip install -r requirements.txt
下载预训练的权重:YOLOv5 需要预训练的权重来执行对象检测。您可以通过运行以下命令从官方 YOLOv5 网站下载权重:
wget https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.pt
测试 YOLOv5:您可以通过运行以下命令来测试 YOLOv5:
python detect.py --weights yolov5s.pt --img 640 --conf 0.4 --source 0
运行上述步骤后,下载此 github 存储库中给出的 main.py 程序。它包含用于从 Arducam 捕获图像的程序,将它们发送到 Yolo 模型进行检测,最后如果在图像中检测到一个人,则将检测到的图片的通知发送到电报 API。
代码说明
主程序
此代码是一个 Flask 服务器应用程序,它以 JPEG 格式的图像作为输入并使用 YOLOv5 模型执行对象检测。然后对检测到的对象进行分类,如果在图像中检测到人,则会将一条消息与图像一起发送到 Telegram 聊天组。
该代码首先导入必要的库并初始化 Flask 应用程序。然后,它会为图像文件设置上传目标并使用令牌初始化 Telegram 机器人。调用 YOLOv5 模型的 detect 模块中的 run 函数来执行目标检测。如果检测到有人,则会将一条消息连同图像一起发送到 Telegram 聊天组。
在上传功能中,服务器检查传入的请求是否为 POST 请求,内容类型是否为 JPEG 格式的图像。如果是,它将图像保存到一个文件并设置一个标志,指示应该执行对象检测。然后创建一个单独的线程来运行 detect_person 函数,该函数调用 run 函数来执行对象检测。如果检测到有人,则调用send_telegram_message函数向Telegram聊天群发送消息。
7.输出
整个项目的输出如下图所示:
八、结论:
总之,使用 Arducam、WizFi360、YOLOv5 和 Telegram Bot 开发的智能监控系统在安全和监控领域显示出巨大的潜力。通过集成这些技术,系统可以实时有效地检测并提醒用户任何人的存在,从而降低犯罪活动的可能性。
Arducam 和 WizFi360 的组合提供了可靠稳定的图像捕获和传输,而 YOLOv5 被证明是一种准确高效的物体检测模型。此外,Telegram Bot 的集成允许快速轻松地通知检测到的人的存在,使系统能够对任何潜在的安全威胁做出快速响应。总体而言,智能监控系统的成功开发强调了利用先进技术增强公共安全和安全的重要性。安全。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





