
资料下载


MKR FOX 1200运动触发器开源分享
李明聪
分享资料个
描述
注意:本教程可能已过时,请到此处获取更新版本。
背景
该项目依赖于 Sigfox 网络的地理定位功能。
位置计算基于来自 Sigfox 基础设施的数据,这些数据来自设备发送并由不同基站接收的相同消息的多个副本。使用的方法不是基于飞行时间或信号多普勒频移,而是基于信号强度(RSSI - 接收信号强度指标)使用概率模型(选择概率最高的位置)。Sigfox 地理定位服务将在 2017 年发展,以通过使用机器学习技术提高其准确性。
加速度计
另一项关键技术是 MMA8451 设备内部的微机械加速度计:我们的项目使用 I2C 接口传感器来检测运动并触发与 Sigfox 网络的通信。由于 SAMD21 和 Sigfox 技术的低功耗模式,预计该项目可以在一对 AA 碱性电池上运行数月。
成分
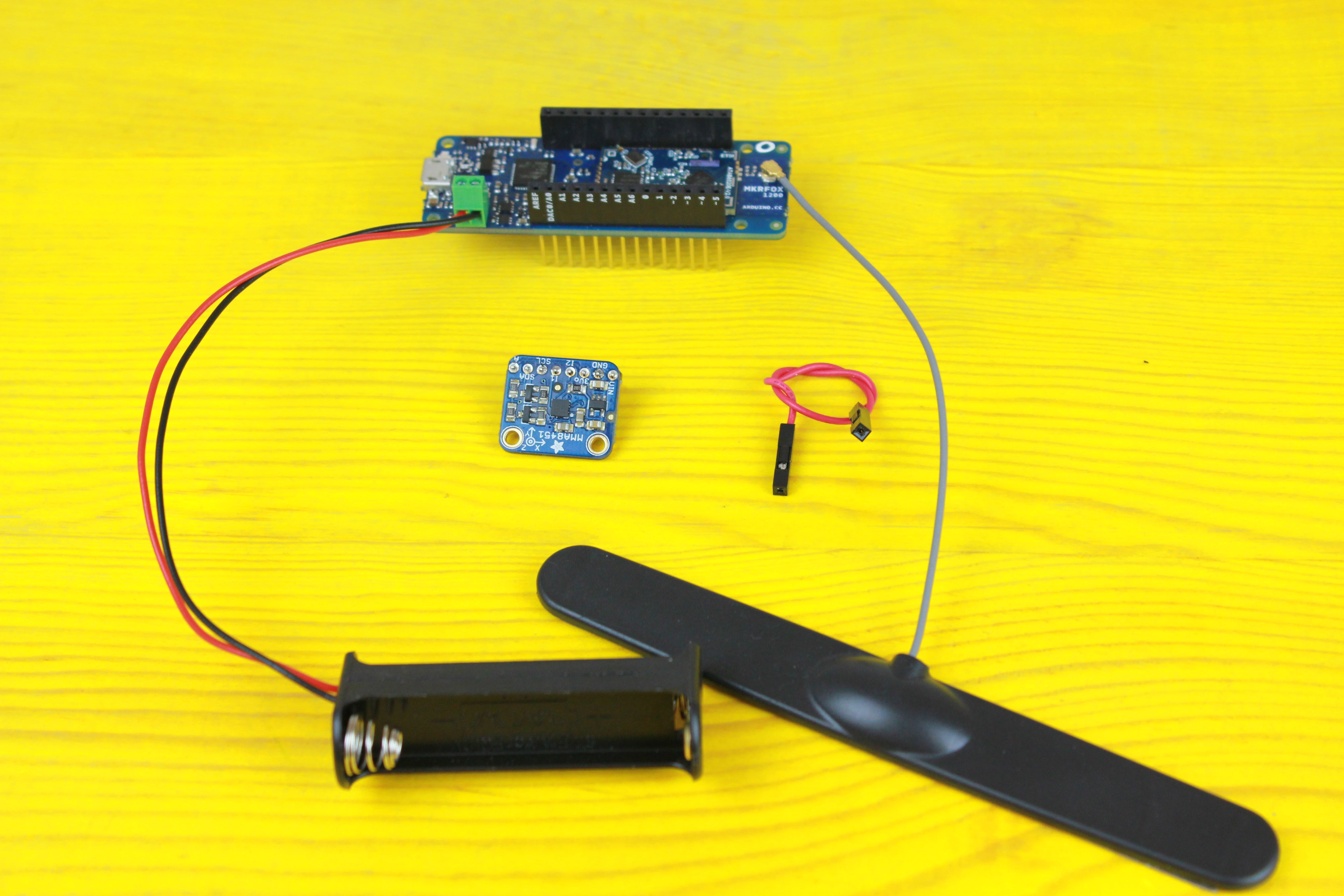
构建它
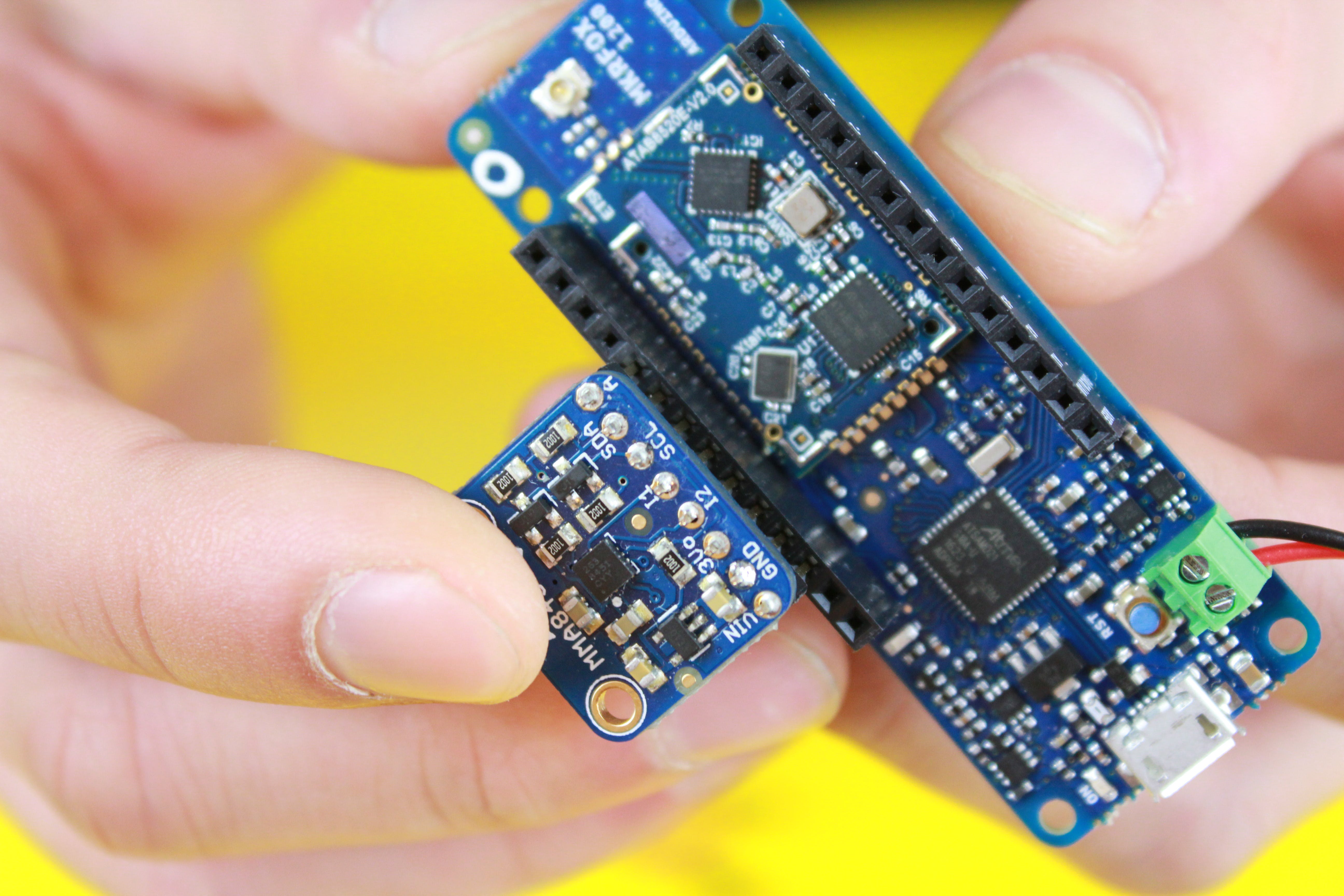
将 3 轴连接到 MKR FOX 1200,如图所示:
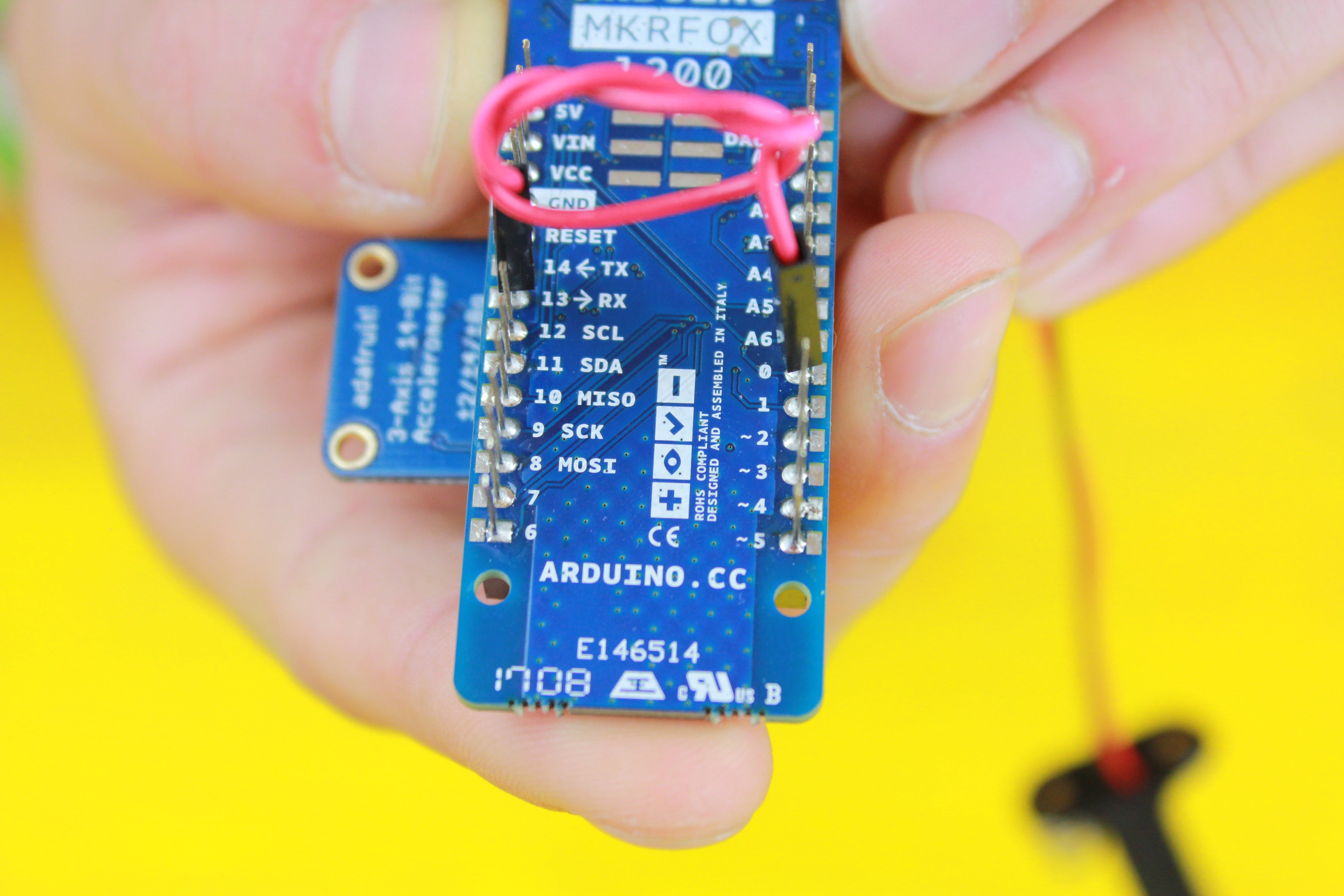
在针脚 14 和针脚 0 之间连接跳线:
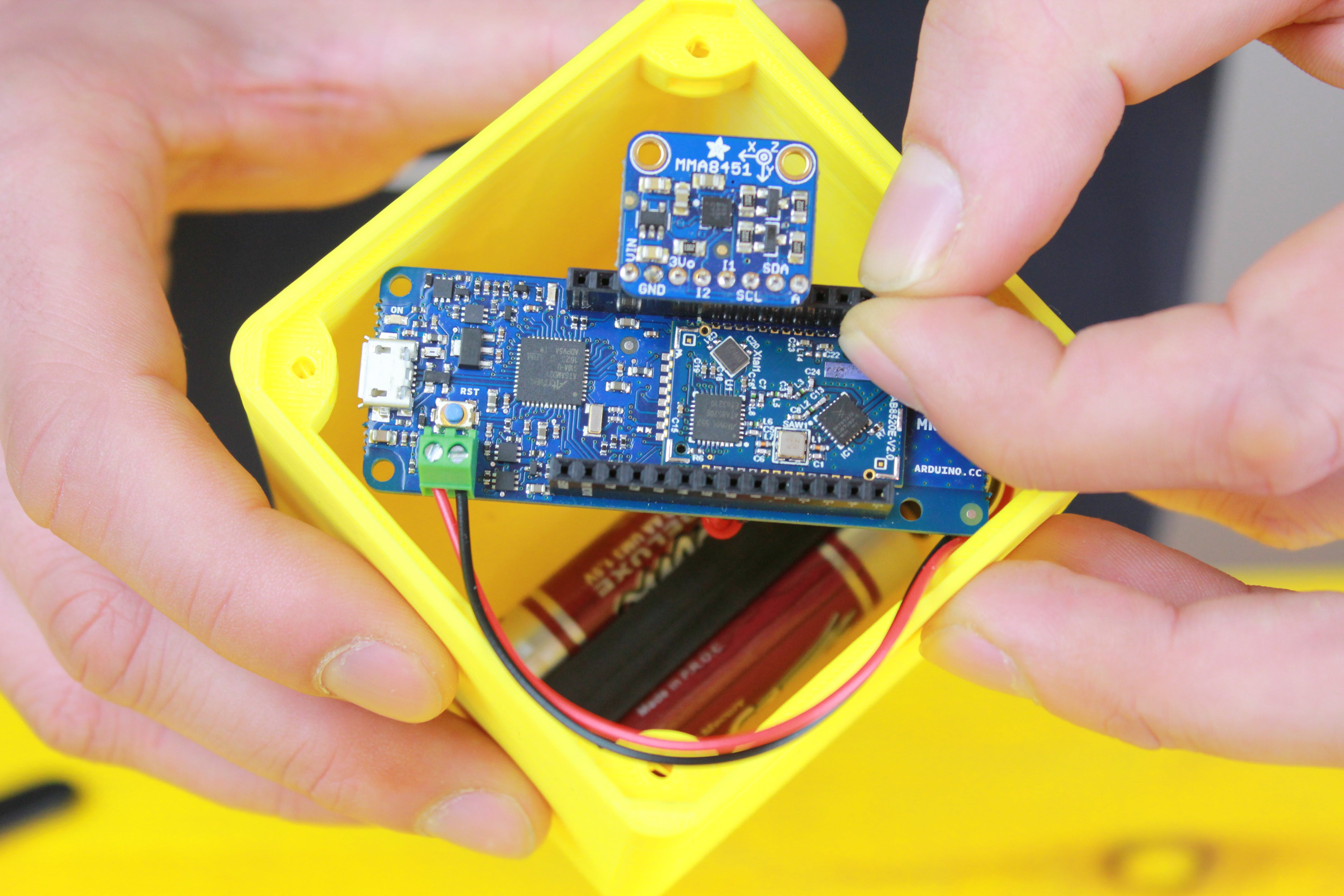
放在一个漂亮的盒子里:
将盒子放在车内:

这个怎么运作
一旦运动传感器触发,MKR FOX 将发送一条警报消息,其中包含从网络获取的坐标。
软件
在软件方面,如果您还没有完成,请按照此处的示例注册您的 MKR FOX 1200 。
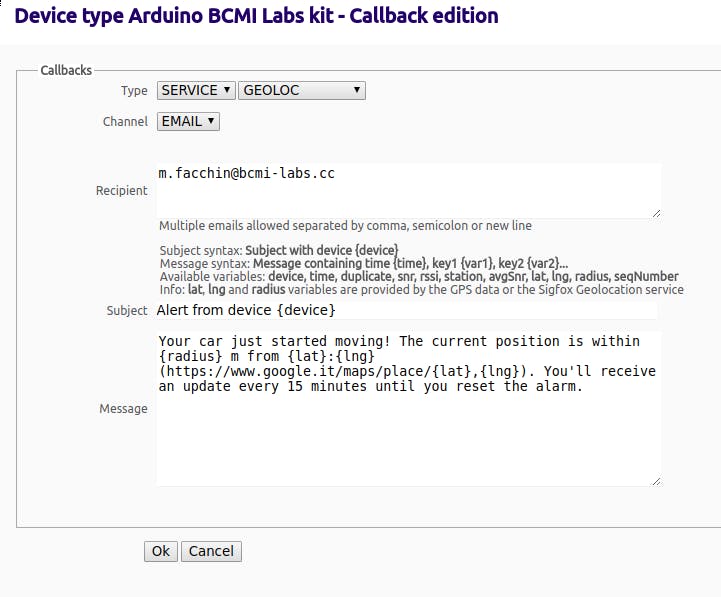
然后到 Sigfox 后端https://backend.sigfox.com配置回调如下:
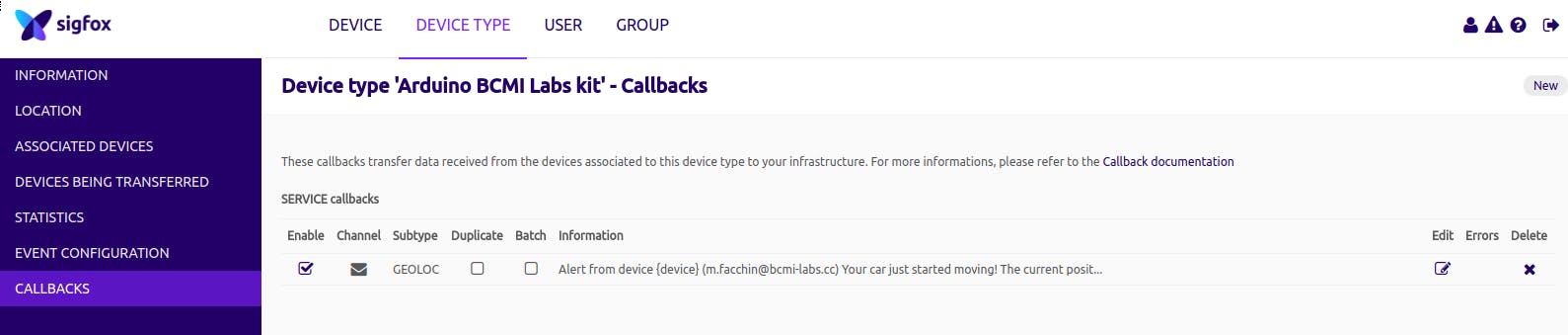
使用您的电子邮件地址更改收件人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







