
资料下载


电池供电的图像记录仪开源分享
尚文清
分享资料个
描述
我最近在推特上发布了一些我正在做的工作,我收到一封我认识的人发来的电子邮件,说那又如何,它有什么用?这是一个很好的问题,所以让我们从那里开始。该项目中的摄像头模块价格便宜(低于 10 美元)且功耗低,但分辨率也低(320x320),不完全值得捕捉您生活中那些难忘的时刻。但是,它非常适合在电池供电的设备中进行计算机视觉等工作。特别是,我有兴趣将它与卷积神经网络 (CNN) 一起使用,为此,我们需要数据!即使我要在公共数据上训练我的 CNN,我通常也会使用专门来自设备的一些数据对其进行微调,或者至少使用来自目标设备的图像进行测试。
规划
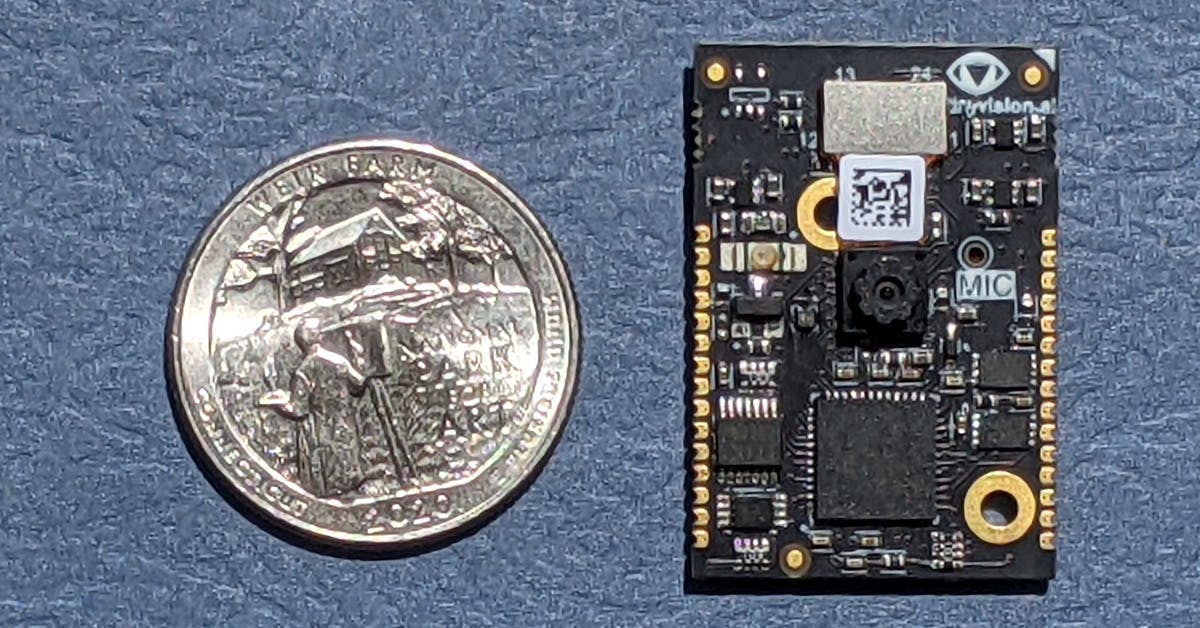
Vision FPGA SoM 是我的应用程序的目标平台。它很小,包括 Lattice Semiconductor 的 FPGA 和 HiMax Imaging 的低功耗相机模块。但是,没有大容量存储。为了收集图像,我需要一块带有 SD 卡和微控制器的板子来将图像传输到卡上。幸运的是,tinyVision.ai为 SoM提供了与 Adafruit Feather 兼容的板,因此它可以轻松地与许多 Feather 微控制器和 FeatherWings 一起使用。
我碰巧有一个 Feather M0 WiFi 和一个 Adalogger FeatherWing(注意:有一个 Feather 包括一个 M0 微控制器和一个 SD 卡,这会更方便,但在构建时缺货)。由于我会将 Feather M0 与两个独立的 Wings(Adalogger 和 SoM)结合起来,下一步是检查引脚冲突。
兼容性
Vision FPGA SoM 是一个安装在 Feather 引脚兼容板上的模块。所以最后我有一个四板堆栈!由于三个主板共享引脚,让我们检查引脚排列的兼容性。
Adalogger 使用的唯一引脚用于 I2C 接口(实时时钟,本项目中未使用)和 SPI(SD 卡)。I2C 和 SPI 接口的公共引脚旨在由多个从机共享,因此这通常不是问题。两块板的 I2C 数据引脚上都有一个上拉寄存器,但在这种情况下似乎没问题。但是,SPI 还需要一个单独的从机专用的片选引脚,该引脚未标准化;它可以是任何 GPIO。在这种情况下,SD 卡芯片选择使用引脚 GPIO 10,不幸的是,该引脚与 SoM 板上的复位相关联。那显然不行。不过,这很容易解决;我只是切断了 SoM 板接头的引脚,使其与 Feather 的 GPIO 10 引脚断开连接。
构建
第一步是将这样的堆叠接头焊接到 Feather M0 板上。
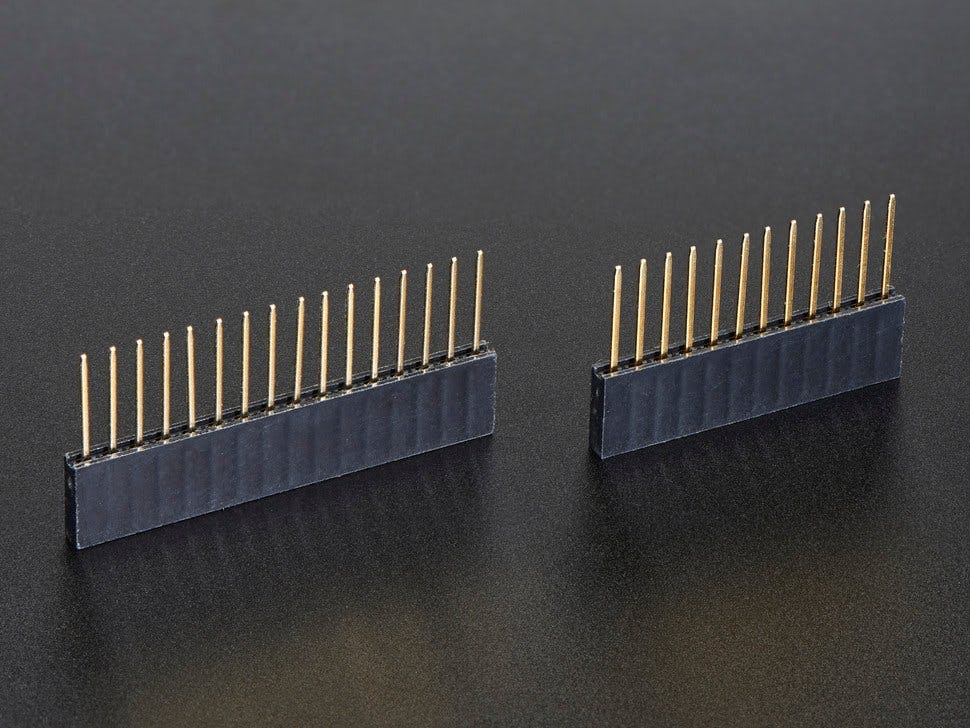
这些接头允许您将两块板连接到 M0,一个在下面,一个在上面。我将母头焊接到 Adalogger 板上以堆叠在下方,将公头焊接到 SoM 板上以堆叠在上方。只需确保将接头焊接在视觉模块连接器的另一侧,以便相机安装在堆栈的外部。
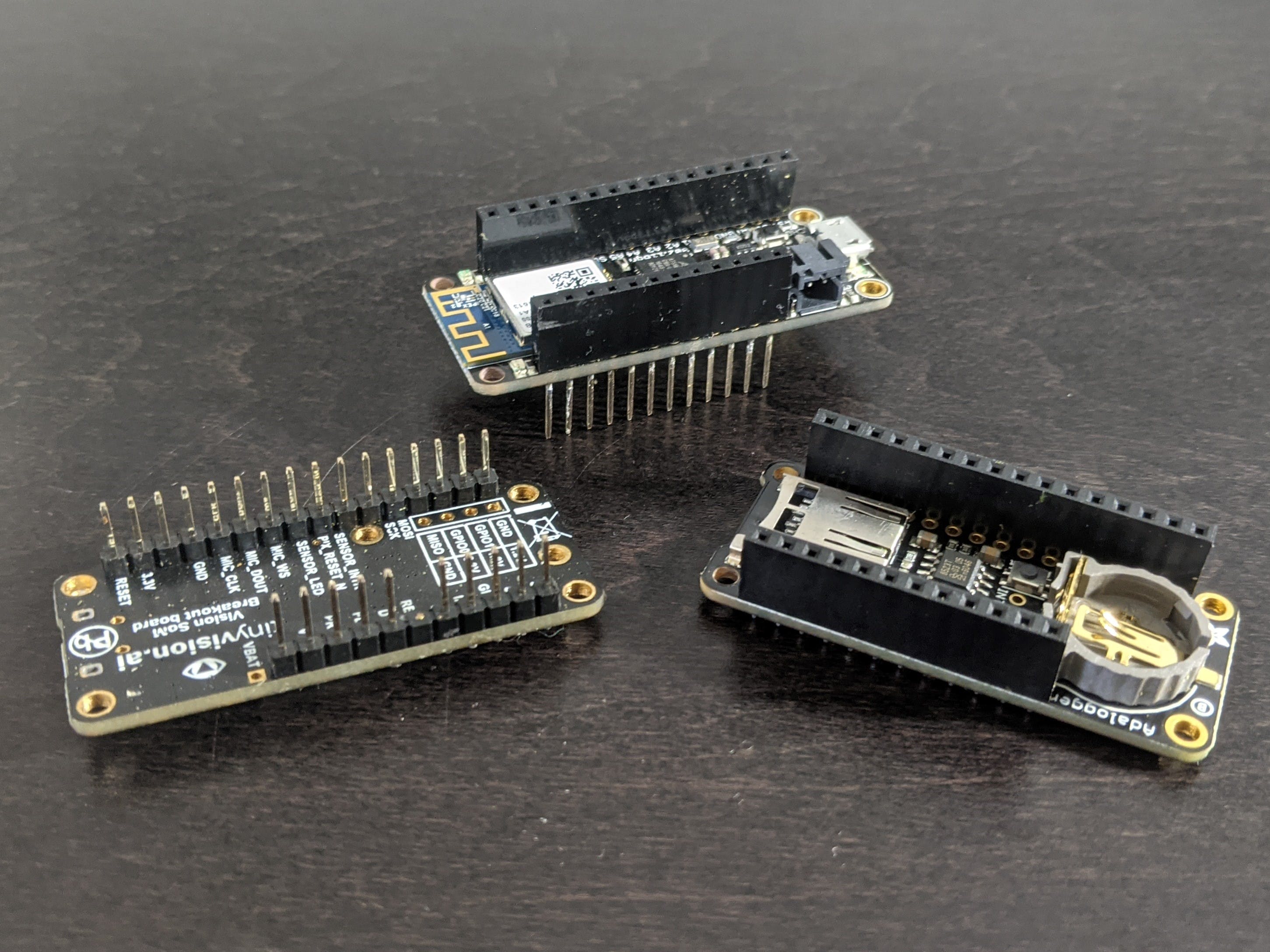
焊接完所有接头后,只需将电路板推到一起并连接视觉模块即可。
FPGA设计
对于那些可能不熟悉 FPGA 的人来说,它们本质上是可编程的硬件芯片。下图描述了将相机模块与 MCU 连接所需的硬件组件。
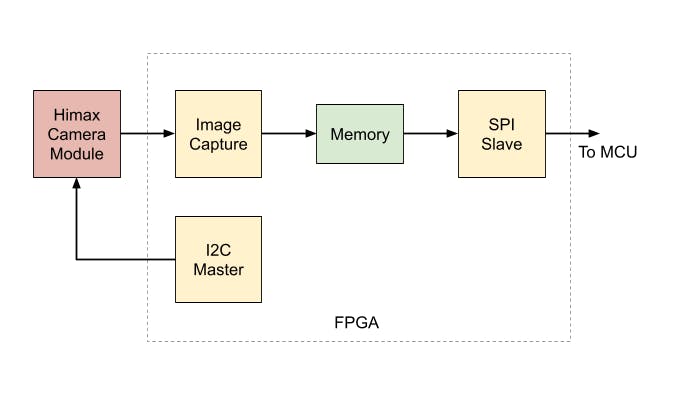
- I2C Master - 在开机时配置相机设置
- 图像捕捉 - 将像素从相机传感器读取到内存
- SPI Slave - 从 MCU 读取像素的接口
附加代码库中提供了实现这些组件的预构建 FPGA 映像。有关编程说明,请参阅 README。
阿杜诺素描
Arduino IDE 支持 Adafruit Feather 平台。Adafruit 网站上有使用 Feather M0 的 IDE 的详细说明,请参阅:Arduino IDE Setup
该sd_logger草图在附加的代码存储库中提供。它不需要任何配置;只需将其加载到 IDE 并将草图上传到 Feather M0。
用法
在 Vision FPGA SoM 上对 FPGA 进行编程并将sd_logger草图上传到 Feather M0 后,您就可以开始了。开机时,草图将搜索第一个未使用的文件名并在大约 10 秒后开始捕获图像。默认情况下,它将每秒捕获 1 张图像。SoM 上的 RGB 灯最初是蓝色的,但每次捕获图像时都会改变颜色,因此您可以判断它是否在工作……以及它是否停止工作。
图像以 PGM 格式写入卡,文件名按顺序编号为 CAMnnnn.PGM。图像以图像传感器的原始格式捕获(对于好奇的,它是拜耳过滤器图像)。我提供了一个简单的 Python 图像转换实用程序来将它们转换为 RGB 图像。
使用 pip 安装实用程序,如下所示:
python -m pip install sxlogic
然后,您可以使用以下内容从计算机转换 SD 卡上的所有文件:
python -m sxlogic.iconvert --debayer --glob F:\*.*
这里F:是 SD 卡路径。
默认情况下会转换为 TIFF 格式并保存到当前目录。TIFF 是默认格式,因为它是无损格式。尝试该-h选项以获得更多选项。
结果
这是我对图像记录器所做的第一件事:

是的,这就是用橡皮筋绑在我的无人机侧面的图像记录器!我的第一次飞行是非常灾难性的,因为我在 GPS 准确性方面遇到了一些问题,而且我的财产充满了无人机的危险。
这是我在后来的飞行中在一些更安全的飞行地点拍摄的无人机图像。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





