
资料下载


用单板计算机制造终结者头骨
王斌
分享资料个
描述
天网资助法案获得通过。
制造机器的创造者 314Reactor 用一台单板计算机制造了两个终结者头骨。
他们的使命是:制作一个酷炫的终结者头像,使用机器学习来观察和说话。
第一个终结者是Raspbinator ,在 2018 年......在 Raspberry Pi 4 之前。它非常酷。
第二个是使用 Nvidia Jetson Nano 制作的,当时它是新的。
和以前一样,Pi 基金会能够制造新的 Raspberry Pi。更强大的单板计算机。
只是他们什么时候会用一个来制作一个新的终结者头骨的问题……
握住 CPU 的底座卡舌。
我终于得到了一个很好的终结者头骨,它在屏幕上准确无误,还能够安装技术,甚至可以通过其中一个眼窝插入摄像头,你可以在这里找到一个。

我能够在那里戳出一个 LED 并将其用作 Raspberry Pi 相机的良好眼窝。里面还有电池和一些可以使 LED 闪烁的电子设备;我不得不把它全部去掉。
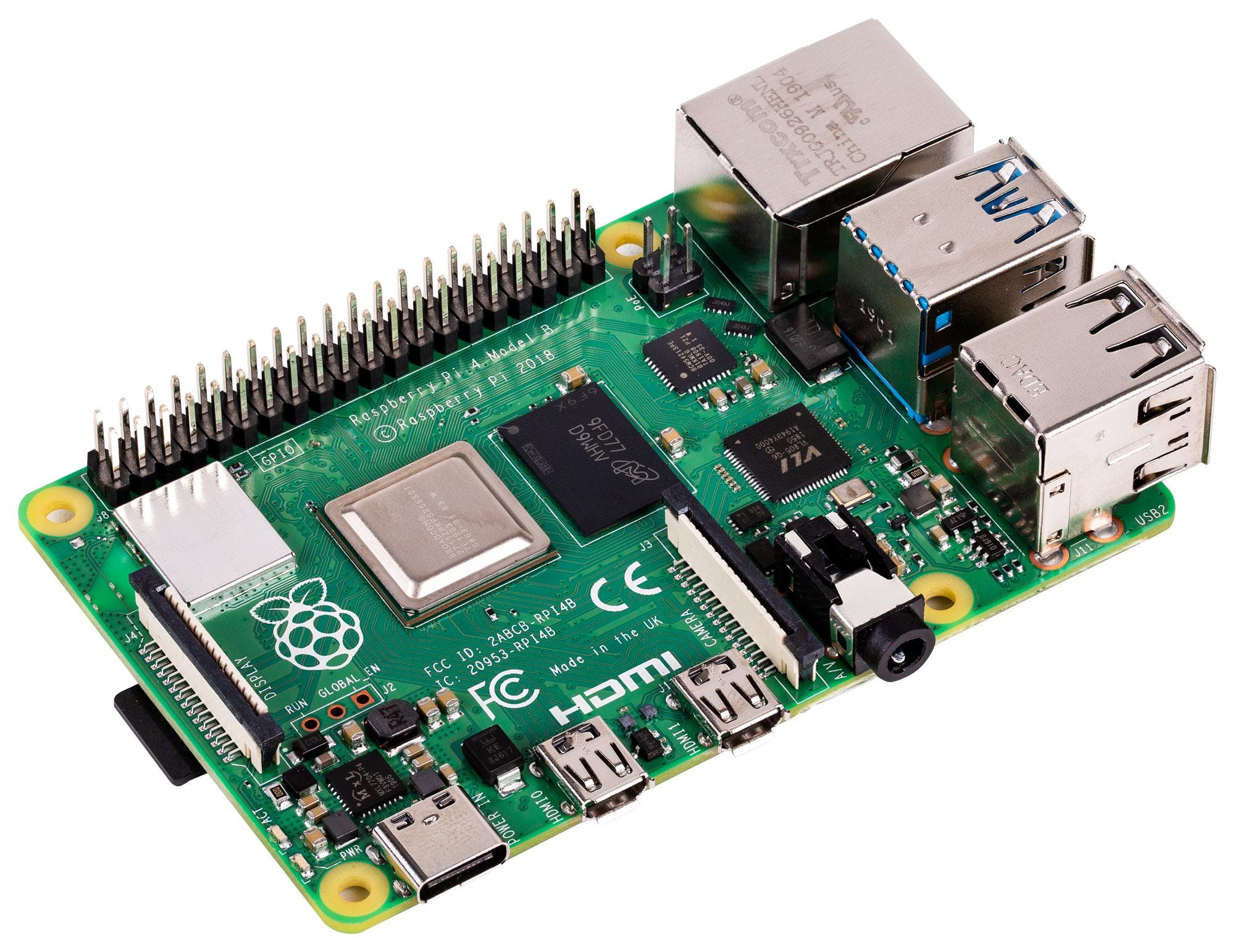
主要处理单元是带有 8GB RAM 的 Raspberry Pi 4,这非常重要,因为该项目使用大量软件和 ML 东西,因此会使用相当多的 RAM。
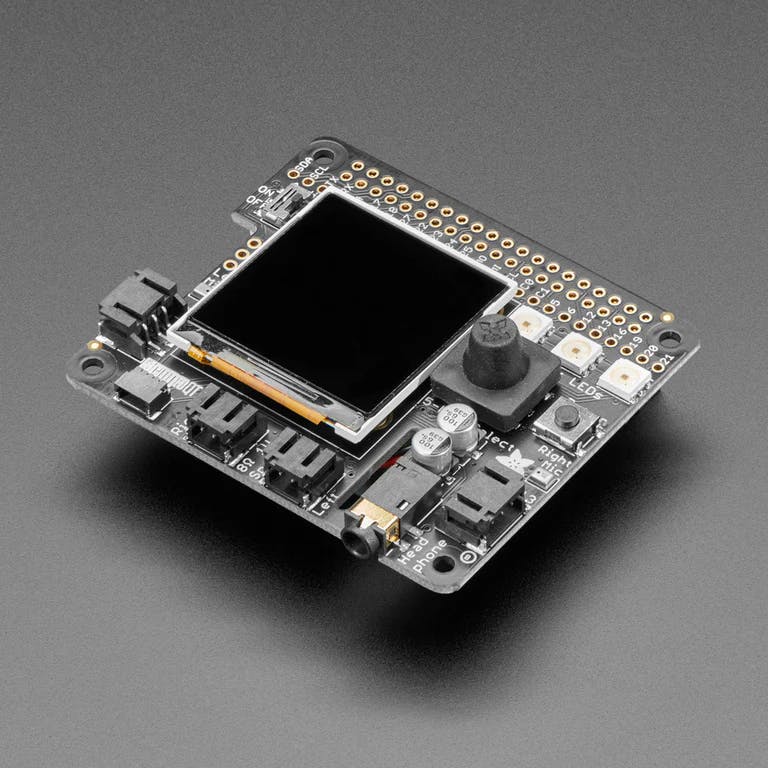
最重要的是,我使用的是 Adafruit 的非常方便的 Braincraft HAT,它的设计考虑到了 RPi 上的 ML。它有一个内置麦克风和连接扬声器和其他东西的接口,非常适合这个项目。
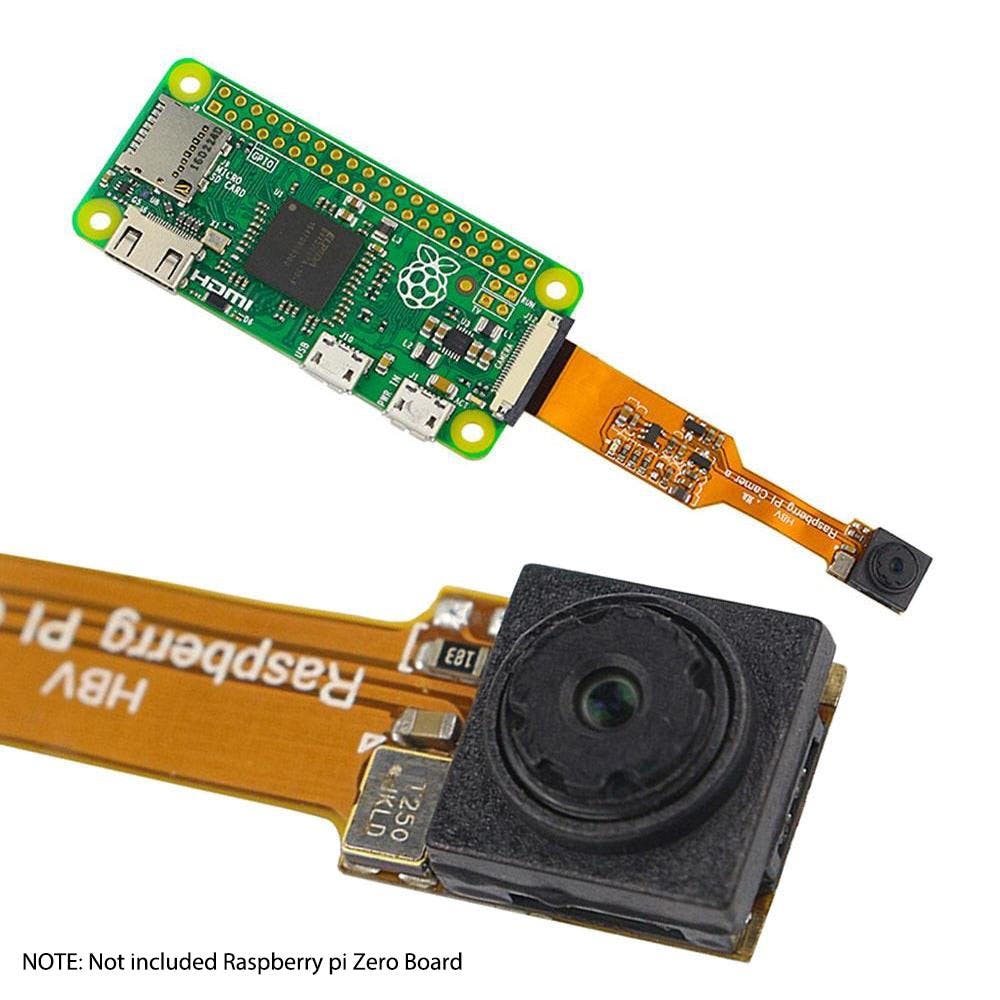
当然,我正在使用相机让头骨看到,我使用的是较小的相机;为 Pi Zero 制作;这是为了更容易装入头骨并通过眼窝观察,并使用适配器使其连接到全尺寸 Pi。
还有一些其他东西,可以在“东西”部分找到,例如带连接器的加长相机电缆和 SD 卡扩展器,以便在 SD 卡安装在头骨中时更容易访问。

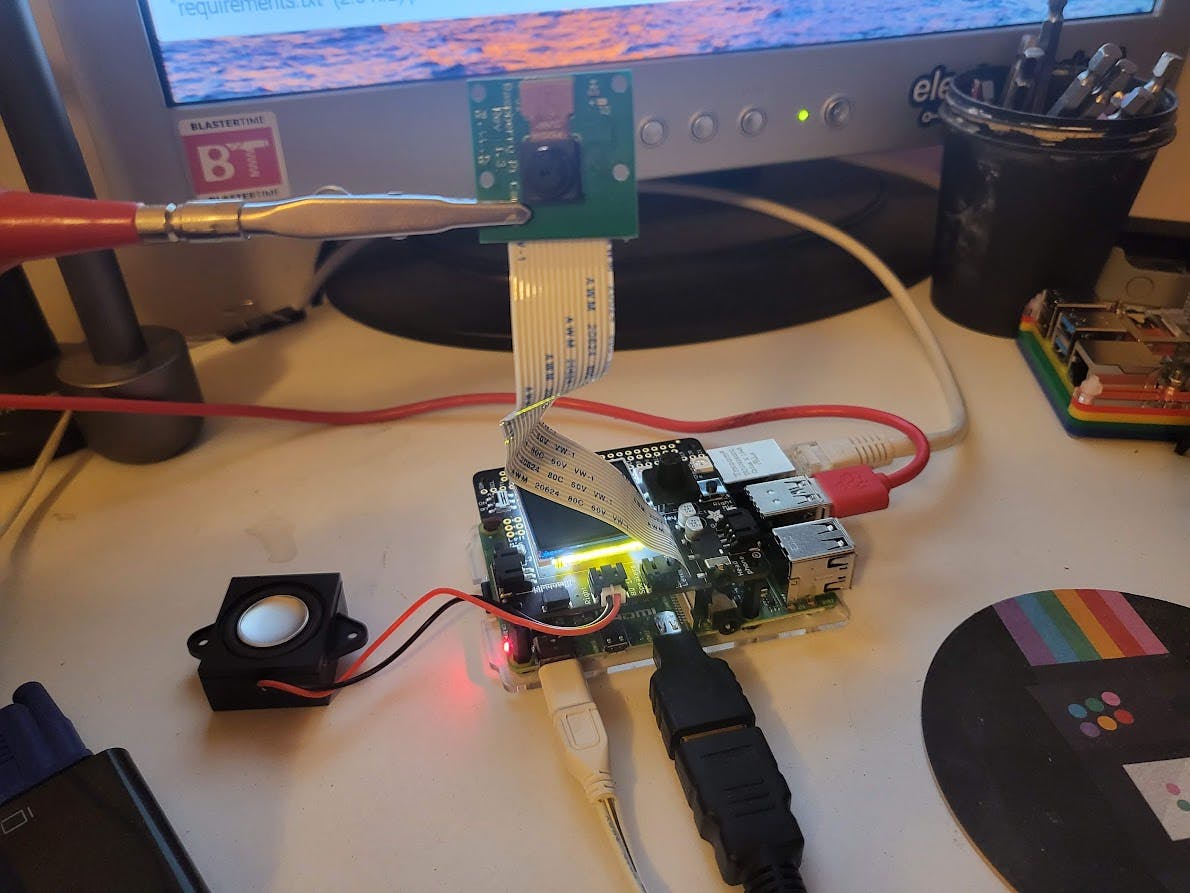
测试硬件、带有 Braincraft HAT 的 Pi、扬声器和摄像头:
连接扬声器:

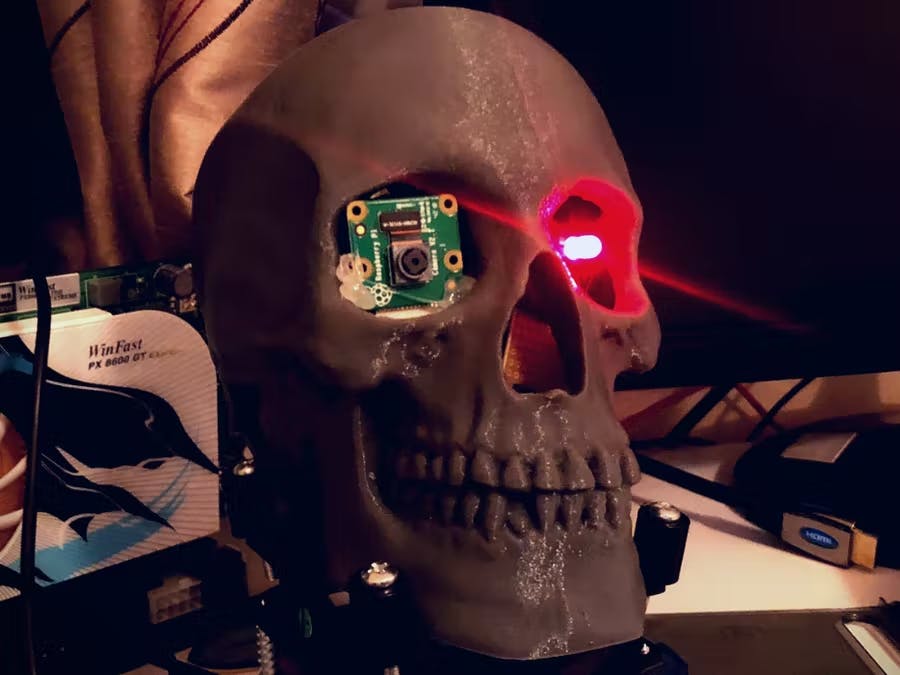
对准和安装相机:


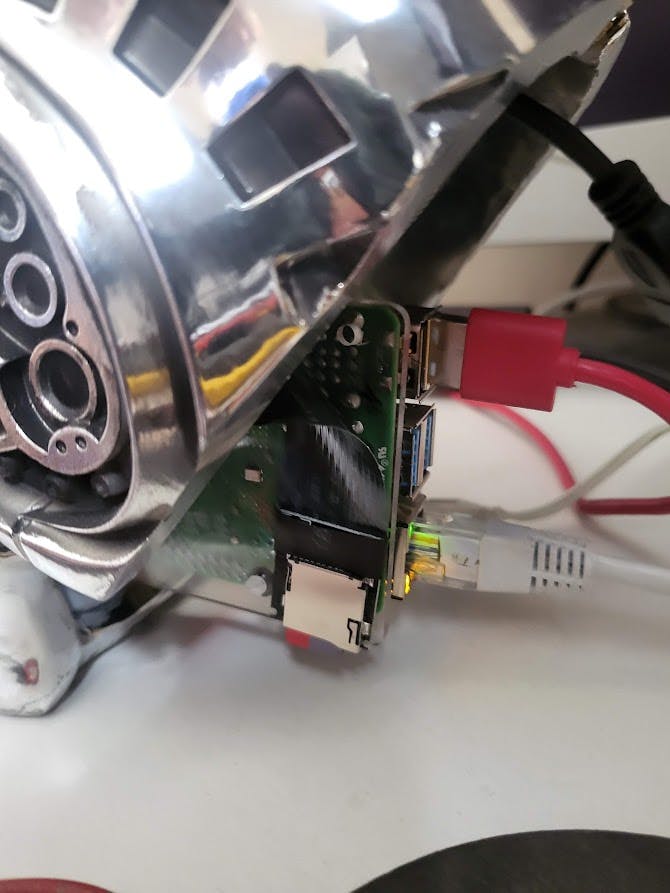
快速浏览一下背面:
SD卡扩展:

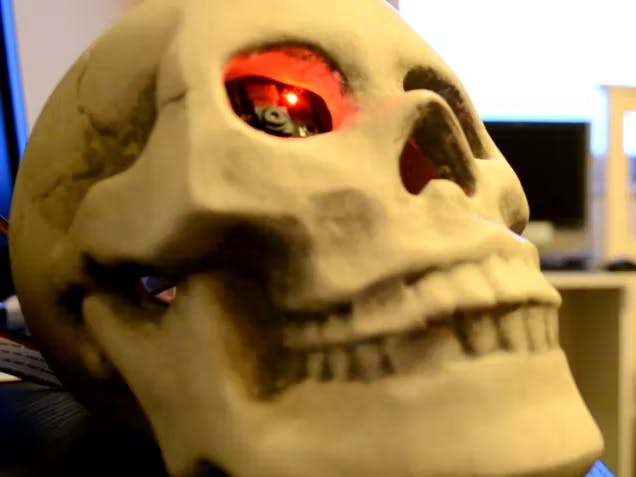
你几乎可以看到相机的眼睛看着你......可怕:

我还使用本教程将剩余的红色 LED 连接到 Raspberry Pi 中:

那个 veroboard 是用一些粘性魔术贴固定的。
头骨能够看到:

其中一些照片是在我制作原型并使用更大的 Raspberry Pi 相机时拍摄的,因此可能与最终结果有所不同。
我还发现头骨会一直向后倾斜,所以我为它定制了一个支架,以防止它倾斜;就像荷马曾经发明的那把椅子:

还有一些粘性魔术贴有助于将 RPi 更好地固定到头骨上。
我也在使用没有红外线滤镜的相机,所以颜色可能看起来很奇怪。但它似乎确实是常态,因为我看到其他 Pi4 与该模型的运行相同。
但它确实可以轻松地成功检测到物体和人类,然后你可以与它交谈,它会做出回应(并不总是做出有意义的回应)。它也可能会误解对它说的话,但这在 STT 中是可以预料到的;特别是在本地运行时。
STT 响应也需要很长时间来处理,当 Soran 单独运行时它只需要几秒钟,但当所有其他东西同时运行时可能需要几分钟。所以肯定需要对代码进行一些优化和修复;但也可能是 Pi 4 在这里被推到了极限。
有趣的是,物体检测和视觉似乎都以相同的速度工作——所以不确定为什么当其他一切都在进行时语音推理如此缓慢;我需要查看是否可以让 STT 在另一个核心上运行,或者找出它运行如此缓慢的原因。
当然,响应的质量还取决于聊天机器人接受训练的训练数据以及 STT 是否正常运行。
幸运的是,Braincraft HAT 上的风扇使 CPU 保持凉爽——它通常不会超过 60 摄氏度。
这是视觉能力的视图,类似于 HK Tank:
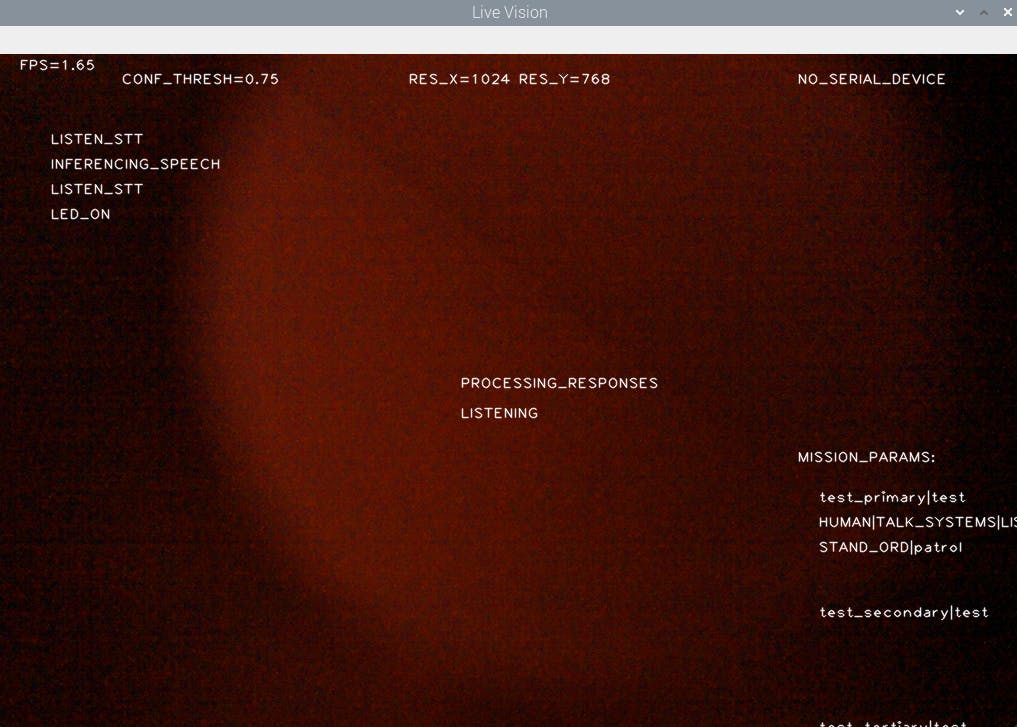
当红外摄像机处于特定条件并且实际上看起来像终结者视觉时,这会显示出来。您还可以查看任务参数、它当前正在做什么、已完成的事件列表等。
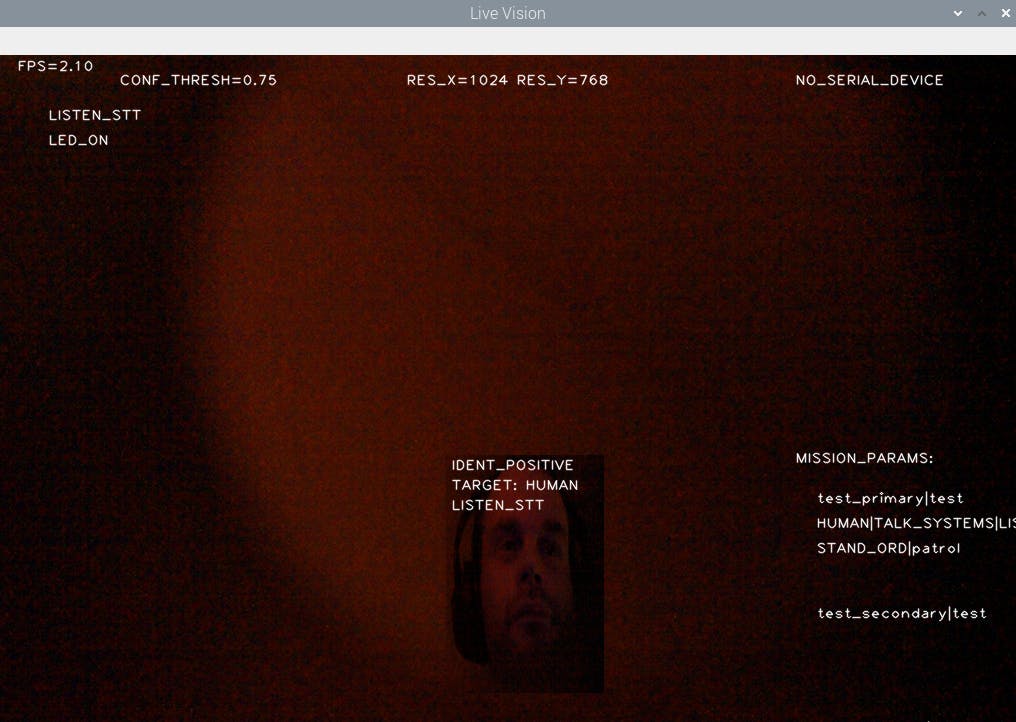
这是检测到有人后的截图:
这里还有一些炫耀镜头:

正如右眼所见,树莓派的电源 LED 灯也亮了起来;这是一个很酷的意外效果。





看起来很 80 年代,很酷。
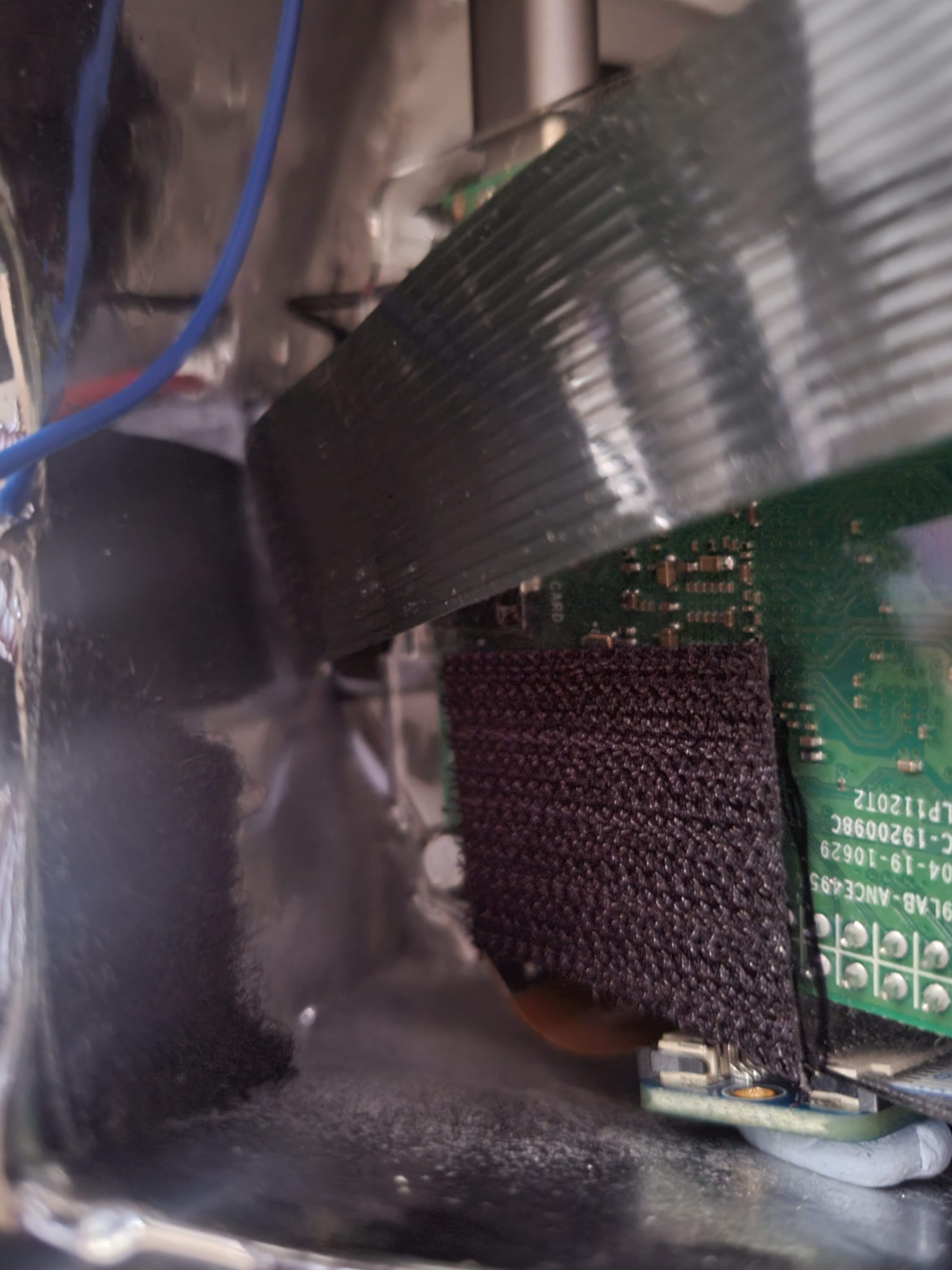
虽然里面和后面有点乱:
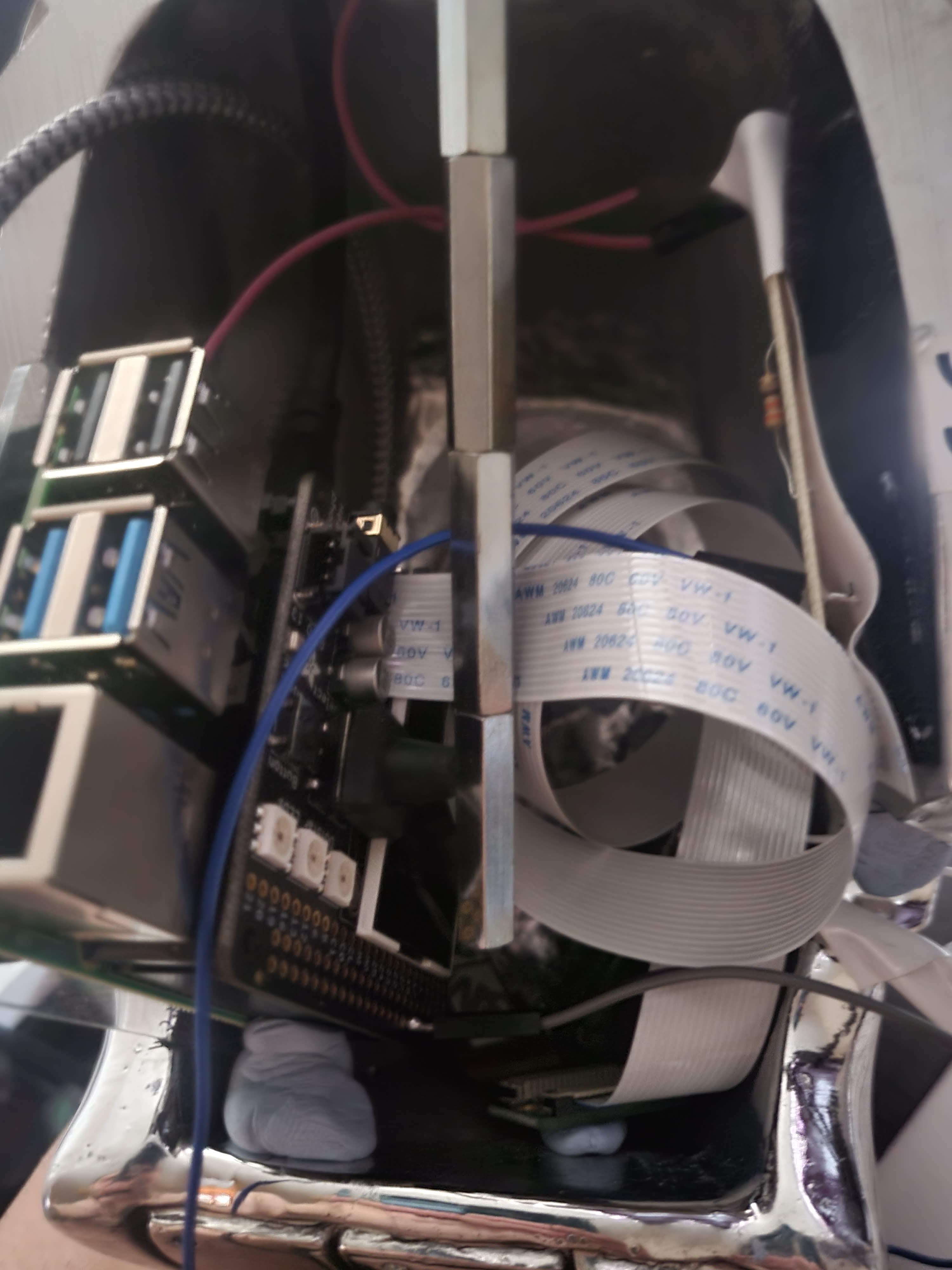
因此,我需要找到一种更好的方法来为项目的下一次发展安装所有内容,并使其成为一个更加一体化但可拆解的单元:

2029年,如果我没记错的话。
因此,如前所述,目前这一切都有些棘手,需要在安装/设置以及代码优化方面做大量工作。因此,请务必将此视为正在进行的项目的开始,我将随着时间的推移更新该项目并在此处发布结果。
此外,随着更新的硬件发布,我将考虑为其增加更多的功能/内存;我考虑过一些 Raspberry Pi 的替代品;但我不确定它们的兼容性和文档 - 但如果有人有任何好的建议请告诉我!
拥有更多 RAM 可以扩展功能;例如为一些GPT-2句子生成添加 Text Machina,以真正增强和混淆其回复。
如果有可用的互联网连接,我什至可以将GPT-3接入其中;这可能会导致一些非常酷的互动。
更多的 CPU 能力将有助于视觉处理和多任务处理能力;希望允许更快的答复。
我认为最重要的事情之一是使用空心终结者头骨的美感——我一直在寻找这样的东西有一段时间了,但我只发现了那些太小或没有眼睛的允许相机透视的插座。所以这是我梦想创造终结者的一大步。
将来我想使用串行输出将这一切连接到一些机器人电子设备上,并为它获得一个大的外骨骼;真的把天网踢掉了。
我的想法和最初的代码始于 2015 年,这是从 Raspbinator 到现在的旅程:

连续 3 个:

非常非常酷。
因此,如前所述,请务必密切关注对此的更新 - 我不会使用当前的头骨作为基础,随着事情的进展和我的新想法而开发更多。我将作为新项目上传重要更新。
请让我知道您的想法,感谢阅读,如果您有任何建议可以帮助我改进项目,请告诉我!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







