
资料下载


RobUV Covid终结者开源
久醉不醒
分享资料个
描述
RobUV Covid 终结者
介绍
在这里,我提出了我的想法,即具有长而灵活的脖子的四足机器人(狗和长颈鹿之间的一种嵌合体)作为针对covid的战斗抢劫解决方案,为什么要使用狗的身体?因为四足动物和机器人在行走时非常稳定,几乎可以在所有地方越过几乎任何类型的障碍物(不像轮胎不能爬楼梯,或无法越过椅子或桌子或其他类型的障碍物),因此在以下方面取得了很大的优势机动性、机动性、信心和稳定性和触手式的长而灵活的脖子,因为它很长,可以到达角落,天花板区域,椅子和扶手椅之间,桌子上方和下方(以从其头部发出的集中紫外线辐射)和同时在同一个头上还有一个机器人操作夹子,也可以作为一种手,可以移动东西、拉椅子等。
原型说明
我会告诉你我没有足够的时间来完成项目所需的这么多工作,我主要需要将触手颈部与四足动物的身体组装起来
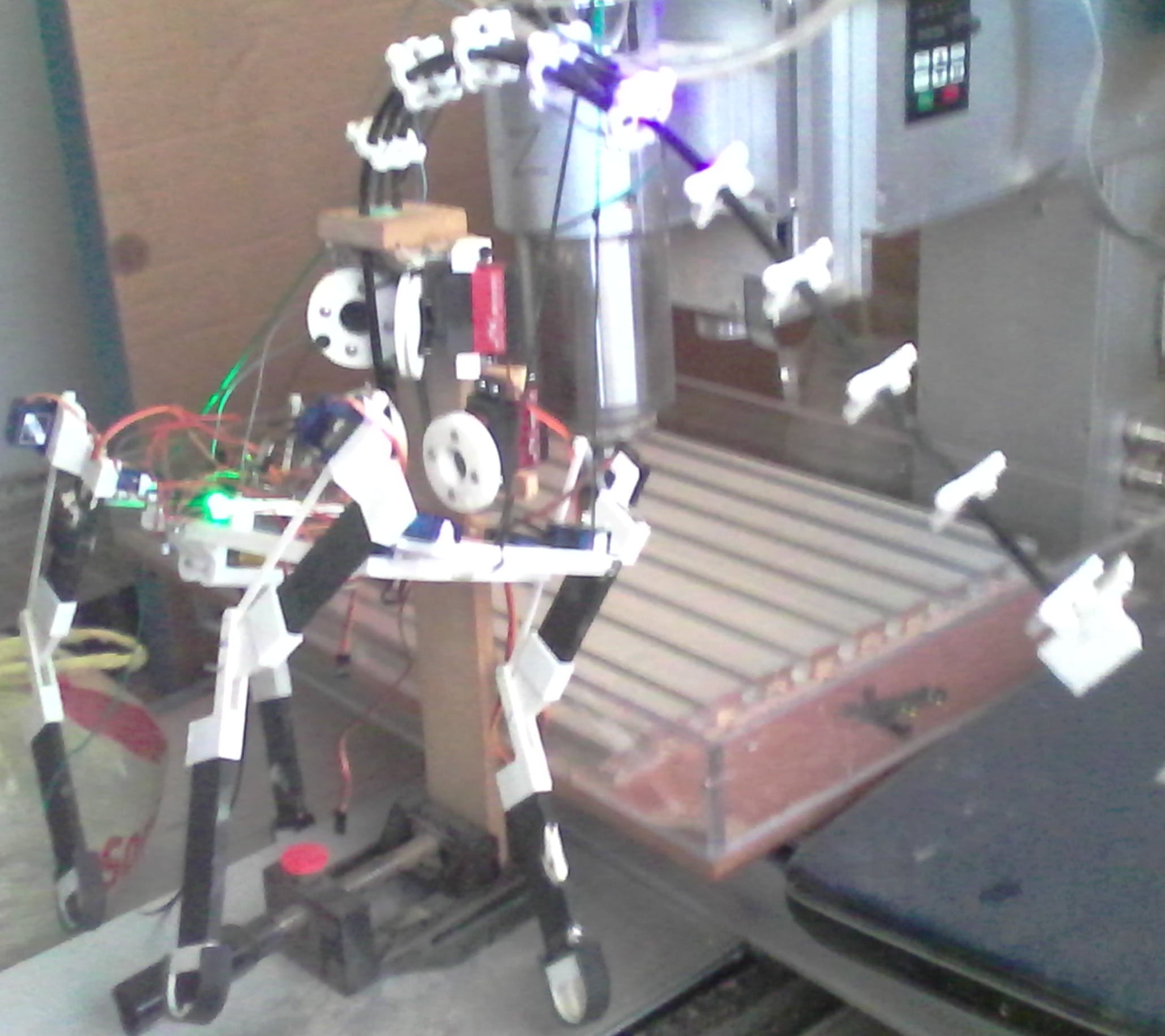
我的原型的四足体
正如你在gif 图像中看到的那样,我用它做的一些不同的测试是让他坐起来,站起来,以及一个简单的常规步行程序
臂颈
在另一个 gif 图像中,您可以看到颈部活动性的第一个功能测试,该颈部将固定 UV LED 头和用于处理物体的机器人夹具
功能与控制
我现在澄清一下,我的想法最初是通过带有传输摄像头的第一人称视觉观察器开始远程控制机器人(稍后将使用人工智能控制机器人)以及当看到机器人看到的东西时他们会如何想象实时通过观察者消除了机器人远程飞行员的紫外线危险
我的想法是用我几年前开发的控件来控制机器人,以一种简单直观的方式控制它:
注意:我即将发布与 PC (USB)、电子和机器人技术(串行输出)兼容的无线 PC3 的最新和改进版本,敬请期待,以了解它何时发生!...
运作
为程序使用任务时间多路复用与 Systick 在微 STM32F401VC 上的发现
正如您在 main.c 程序中看到的那样,我基本上生成了一个名为 outputpwm 的函数,它负责每 20 毫秒更新 12 个腿伺服电机的输出数据,因为这是它处理的控制信号的周期,它不会感觉以大于 50hz 的频率发送伺服电机的更新、更改或位置控制信号,因为它不会注意到它们或至少不正确
留下两种方法来控制身体的 12 个电机:直接在其寄存器中以尽可能快地改变位置,或通过每毫秒接近其最终期望值的位置变量(通过中断 systick)以降低执行速度并且机器人中的生涩序列更少,例如坐姿和站立序列
这是我在程序中分配的引脚列表,用于通过 PWM 控制腿的 12 个伺服电机
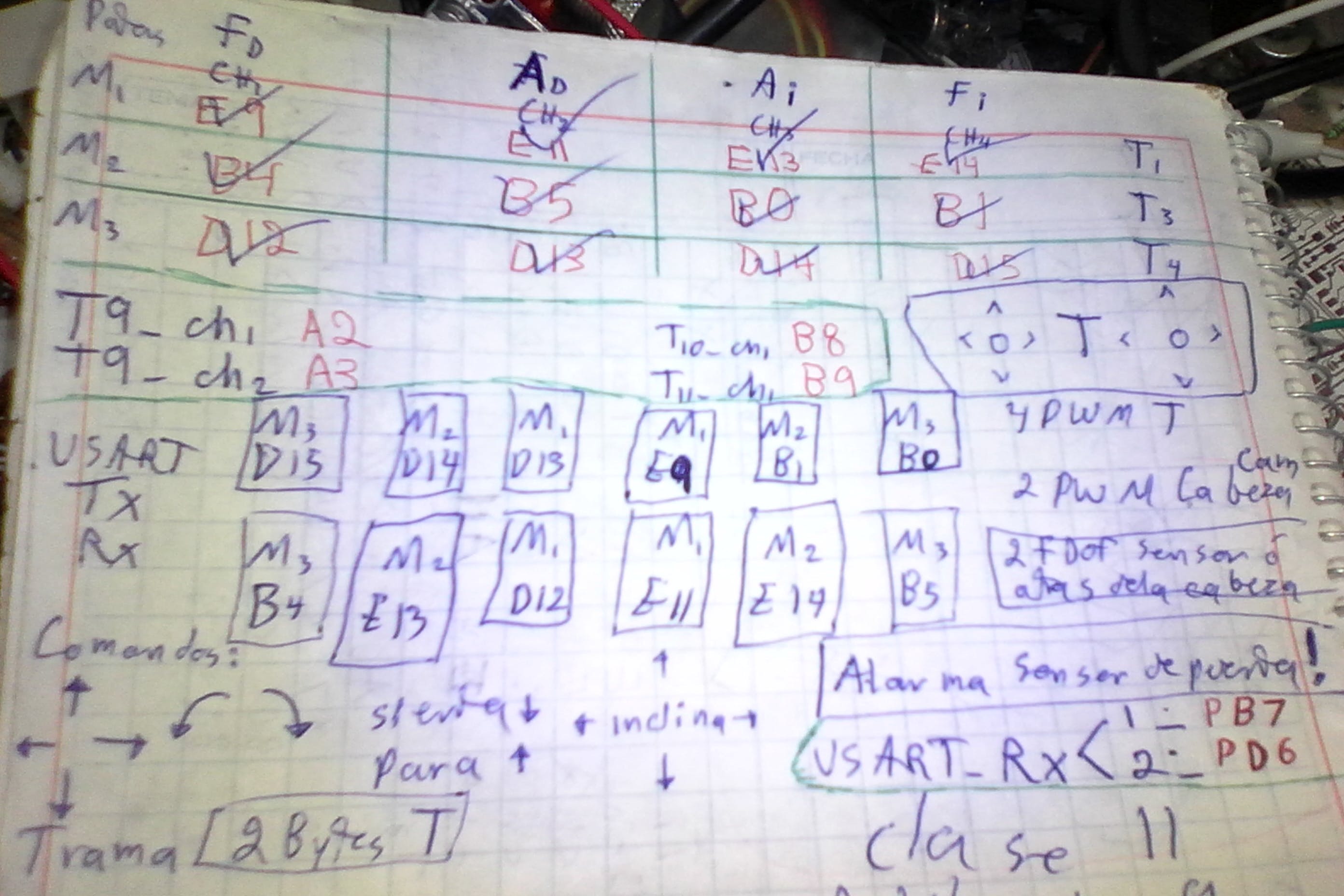
这是机器人所有腿中电机的枚举:

电机 1是第一个并张开双腿电机 2抬高和降低手臂与身体成一条直线电机 3相当于二头肌和三头肌,但由于杠杆重量的作用,放在肩膀上以减轻负荷
我借此机会提一下,用于制造支腿(漆成黑色的部分)的木材是轻木(与模型飞机相同),因此它既轻又坚固。
我澄清说,对于真实大小的机器人(约 2m),您还可以使用轻木板作为它们的腿,或中空碳纤维管和杆
我的机器人黄金法则:
将机器人系统设计得尽可能轻,减少不必要的自重
这个想法的另一个细节是,底座带有发射器摄像头(像球形机器人一样有 2 个轴),前面将承载摄像头,但在背面它将有 PIR 传感器来检测人类的存在,从而更好地理解了这句话“我的眼睛在脖子上”
正如我之前提到的:这是一个小型原型,我用长颈鹿颈触手对我的四足动物设计进行了几次功能测试,最终机器人的高度将从 1:80m 到 2m,它将配备高扭矩电机,以及碳纤维的刚性部分,或者在其有缺陷的轻木(由于其重量轻)中,最终规模机器人中最昂贵的将是高扭矩电机,但这种机器人设计将继续“经济”,成本为低于 $10, 000 美元的材料
保留上面已经提到的所有巨大优势
最后说:我是电子和机器人的粉丝,我喜欢电子和机器人系统的设计和开发,我很想得到赞助来建造一个大尺寸的机器人,但即使我不收到它!...我会找到一种方法让我的梦想成真,付出很多努力和对我所爱的事物的热情我们将再次见到这个机器人的进化,或者很快在另一个项目中问候,下一次见
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





