
资料下载


×
二次开发串口通信协议
消耗积分:1 |
格式:pdf |
大小:351KB |
2017-05-09
蓶的I
分享资料个
lobot机器人二次开发
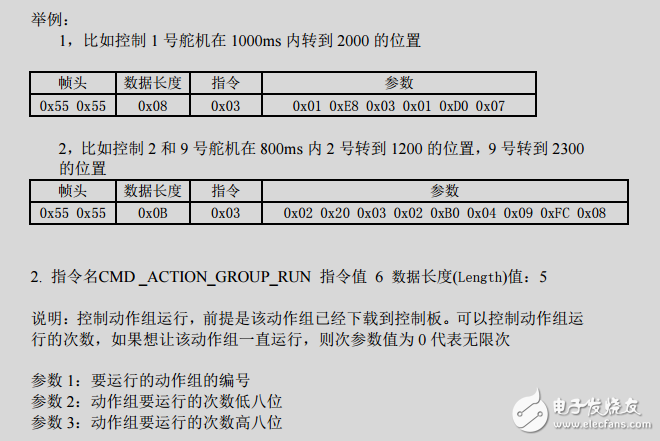
用户的发送数据引脚接到控制板的 RX 插针上,当然用户的控制系统还要跟控制板进行共地(GND),如果用户发送正确数据到控制板,那么控制板上的蓝色 LED2 灯会闪一下,表明已经接收到正确数据。如果发送的是错误数据, 那么蓝色 LED2 灯不会有任何反应,保持常亮,蜂鸣器会“滴,滴”响两声,提示用户发送数据错误 1. 指令名 CMD_ SERVO_MOVE 指令值 3 数据长度 Length:说明:控制任意个舵机的转动,数据长度 Length =控制舵机的个数×3+5 参数 1:要控制舵机的个数参数 2:时间低八位参数 3:时间高八位参数 4:舵机 ID 号参数 5:角度位置低八位参数 6:角度位置高八位参数。..。..:格式与参数 4,5,6 相同,控制不同 ID 的角度位置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






