
资料下载


无人驾驶技术总结分析
分享资料个
图1 无人驾驶系统架构图
算法子系统从传感器原始数据中提取有意义的信息以了解周遭环境情况,并根据环境变化做出决策。Client子系统融合多种算法以满足实时性与可靠性的要求。举例来说,传感器以60HZ的速度产生原始数据,Client子系统需要保证最长的流水线处理周期也能在16ms内完成。云平台为无人车提供离线计算以及存储功能。通过云平台,我们能够测试新的算法、更新高精度地图并训练更加有效的识别、追踪、决策模型。
无人驾驶算法
算法系统由几部分组成:第一,传感并从传感器原始数据中提取有意义信息;第二,感知,以定位无人车所在位置以及感知现在所处的环境;第三,决策,以可靠安全抵达目的地。
传感
通常来说,一辆无人驾驶汽车装备有许多不同类型的主传感器。每一种类型的传感器都各有优劣,因此,来自不同传感器的传感数据应该有效地进行融合。现在无人驾驶中普遍使用的传感器包括以下几种。
GPS/IMU:通过高达200Hz频率的全球定位和惯性更新数据以帮助无人车完成自我定位。GPS是一个相对准确的定位用传感器,但是它的更新频率过低,仅仅有10HZ,不足以提供足够实时的位置更新。IMU的准确度随着时间降低,在长时间内并不能保证位置更新的准确性,但是,它有着GPS所欠缺的实时性,IMU的更新频率可以达到200HZ或者更高。通过整合GPS与IMU,我们可以为车辆定位提供既准确又足够实时的位置更新。
LiDAR:激光雷达可被用来绘制地图、定位以及避障。雷达的准确率非常高,因此在无人车设计中雷达通常被作为主传感器使用。激光雷达是以激光为光源,通过探测激光与被探测无相互作用的光波信号来完成遥感测量。激光雷达可以用来产生高精度地图,并针对高精地图完成移动车辆的定位;以及满足避障的要求。以Velodyne 64-束激光雷达为例,它可完成10HZ旋转并每秒可达到130万次读数。
摄像头:被广泛使用在物体识别以及物体追踪等场景中,像是车道线检测、交通灯侦测、人行道检测中都以摄像头为主要解决方案。为了加强安全性,现有的无人车实现通常在车身周围使用至少八个摄像头,分别从前、后、左、右四个维度完成物体发现、识别、追踪等任务。这些摄像头通常以60HZ的频率工作,当多个摄像头同时工作时,将产生高达1.8GB每秒的巨数据。
雷达和声呐:雷达通过把电磁波能量射向空间某一方向,处在此方向上的物体反射碰到的电磁波;雷达再接收此反射波,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。雷达和声呐系统是避障的最后一道保障。雷达和声呐产生的数据用来表示在车的前进方向上最近障碍物的距离。一旦系统检测到前方不远有障碍物出现,则有极大的相撞危险,无人车会启动紧急刹车以完成避障。因此,雷达和声呐系统产生的数据不需要过多的处理,通常可直接被控制处理器采用,并不需要主计算流水线的介入,因为可实现转向,刹车、或预张紧安全带等紧急功能。
感知
在获得传感信息之后,数据将被推送至感知子系统以充分了解无人车所处的周遭环境。在这里感知子系统主要做的是三件事:定位、物体识别以及物体追踪。
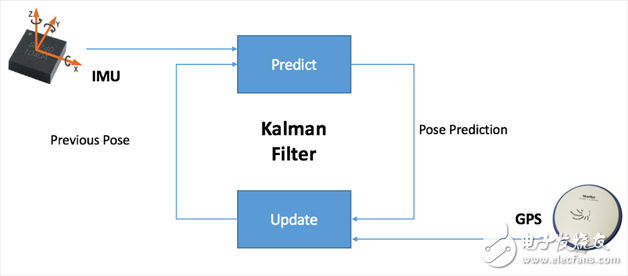
图2 基于GPS/IMU的定位
定位
GPS以较低的更新频率提供相对准确的位置信息;IMU则以较高的更新频率提供准确性偏低的位置信息。我们可使用卡尔曼滤波来整合两类数据各自的优势,合并提供准确且实时的位置信息更新。如图2所示,IMU每5ms更新一次,但是期间误差不断累积精度不断降低。所幸的是,每100ms可以得到一次GPS数据更新,以帮助我们校正IMU积累的误差。因此,我们最终可以获得实时并准确的位置信息。然而,我们不能仅仅依靠这样的数据组合以完成定位工作。原因有三:其一,这样的定位精度仅在一米之内;其二,GPS信号有着天然的多路径问题将引入噪声干扰;其三,GPS必须在非封闭的环境下工作,因此在诸如隧道等场景中GPS都不适用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






