
资料下载


机器人运动自适应智能外骨骼系统的研发
分享资料个
运动自适应外骨骼机器人系统的主要功能是为脑卒中患者提供上肢关节协同运动康 复训练,主要是通过与患者建立的空间物理联接以物理交互和感知交互的方式实现。外骨骼机器人系统和人体紧密联接,相互作用,相互影响,协同完成运动康复训练任务。由于脑卒中患者的生理和心理较常人更显脆弱,外骨骼机器人系统在物理交互和感知交互两个方面需要进行严格的功能和可靠性测试,确保在实验室开发环境中将存在的问题发现并解决,再用于临床康复训练。
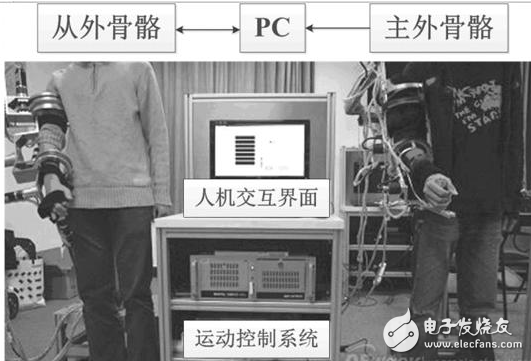
运动自适应外骨骼机器人系统(下图)主要包括主、从外骨骼机器人系统,运动控制系统和人机交互界面等。主、从外骨骼机器人具有相同的七自由度运动学结构,可安装在不同支架供理疗师和患者单独穿戴,也可安装在同一支架由患者健肢和患肢分别穿戴。支架高度可大范围调节,适应穿戴者的坐姿和站姿状态。主、从外骨骼机器人可以方便地变换姿态适应左右侧上肢,上臂和前臂的杆件长度可在一定范围内调节以适应不同身材的患者。主外骨骼机器人每个关节自由度安装了高精度编码器,实时记录关节角度,从外骨骼机器人的关节自由度相应的安装了独立的电机和齿轮减速箱组合, 直接驱动关节旋转运动。人体与外骨骼机器人通过位于上臂、前臂和手部的柔性绑带联接,保证训练舒适性。
此外,系统根据不同运动康复训练方式制定了相应的智能控制策略,理疗师通过人机交互界面可以选择合适的运动训练方式,操作主从外骨骼机器人系统开展康复训练。康复训练数据库自动记录每次训练过程中患者运动学和动力学数据, 方便理疗师进行定量分析和比较,制定具有针对性的康复训练方案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





