
资料下载


×
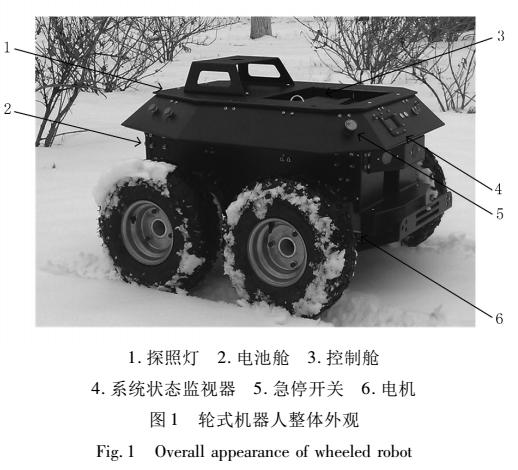
农用轮式机器人运动控制系统
消耗积分:3 |
格式:rar |
大小:1.46 MB |
2018-01-30
分享资料个
当前,机器人在农业生产中得到了越来越广泛的应用,移动机器人是农业机器人研究领域的一个重要分支,也是研发较早的一种机器人,主要包括轮式、足式、跳跃式及蛇形式等。其中,足式机器人虽然适应性强,但机构复杂,导致难以控制;履带式移动平台移动速度慢、转向时对地面破坏程度大;跳跃式和蛇形式在复杂环境和机动性等具有独特的优越性,但运动平稳性及承载能力都明显逊色于轮式机器人。
轮式移动机器人速度快,运动平稳而灵活,承重能力及适应能力极强,虽具有无法在极复杂地形进行精确的轨迹控制等问题;但由于具有自重轻、机构简单、承载能力强及工作效率高等优点,在农业领域有着广阔的引用前景及不可撼动的地位,已经成为农业发展中的重中之重。
针对农田环境复杂因素较高等问题,本文提出了利用两个控制器分别做控制核心和驱动核心的创新结构设计,保证了农用轮式机器人执行任务时控制器的效率问题。机器人的电机模块由前轮和后轮2个独立驱动器模块和4个直流无刷伺服电机组成,每个驱动模块都是一套完整的直流无刷伺服驱动控制方案,并对直流无刷电机搭配减速器减速比(50:1),1024线光电编码器,可以对电机的速度、电流进行闭环控制。采用分布式三级递阶控制方案,可以使轮式机器人工作稳定性强,系统可维护程度高,并且方便扩展。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






