
资料下载


×
采用RBF和LS-SVM的半潜式海洋平台定位系统设计
消耗积分:0 |
格式:rar |
大小:0.95 MB |
2017-10-31
分享资料个
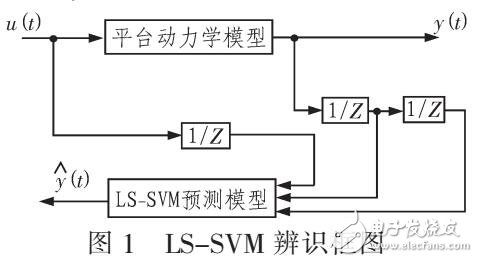
随着人类的不断发展,陆地资源已经消耗殆尽,我们不得不把眼光投向蔚蓝的海洋。海域经济是国家繁荣和发展的重要经济支柱之一,而海洋平台在海洋海防及海域经济中起着极为重要且不可替代的作用。半潜式海洋平台的地位在发展海洋经济的过程中越来越重要,动力定位系统(Dynamic Positioning System,DPS) 对于平台的重要性是显而易见的2。动力定位系统是一种闭环的控制系统,它不需要借助外界力量,依靠海洋平台自身的动力来对海洋平台进行定位的控制系统。其功能与传统的助锚泊系统不同,它能不断检测出海洋平台的实际位置与给定的目标位置的偏差,再根据外界风、浪、流等环境因素的影响计算出使海洋平台恢复到目标位置所需推力的大小,从而使海洋平台尽可能地保持在海平面上要求的位置上。对于动力定位系统这样一个非线性、大时滞和大惯性的这样一个对象,很难使用精确的模型进行描述。最小二乘支持向量机能够很好的对其进行非线性建模,并结合广义预测控制设计符合要求的控制器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






