
资料下载


×
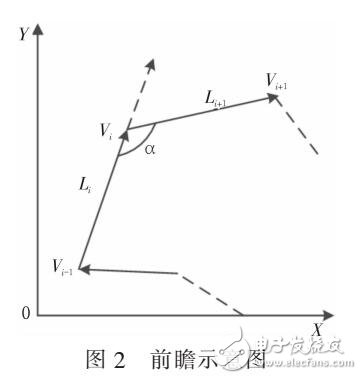
一种面向连续轨迹的动态前瞻算法
消耗积分:0 |
格式:rar |
大小:0.93 MB |
2017-10-31
分享资料个
现代高端工业应用中,运动控制系统所需要处理的加工轨迹越来越复杂,速度与精度要求也不断提高。然而,在传统的运动控制过程中,控制系统对每段轨迹进行独立插补,并且每段轨迹的速度规划均由零加速到目标速度,最终减速停止。在复杂多轨迹的加工过程中,这种速度规划机制不仅给电机、机床带来了巨大的冲击,同时还大大降低了加工效率。在复杂的轨迹运动控制中,希望在保证控制的精度前提下,提高加工效率,减少对电机的冲击。因此,在保证控制精度的前提下,如何实现轨迹衔接处的平滑过渡,是解决复杂轨迹加工的技术关键。为此,文中提出了一种动态前瞻控制算法。此算法能够根据轨迹的几何特征、加工精度要求以及加减速要求,预先规划轨迹的加工速度以及各段之间衔接处的过渡速度,从而实现复杂轨迹的平滑过渡。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



