
资料下载


×
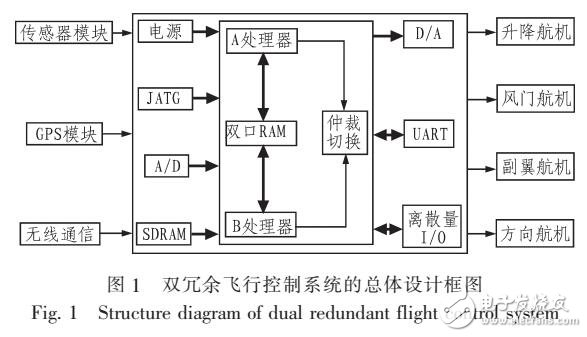
基于ARM的双冗余飞行控制系统设计
消耗积分:0 |
格式:rar |
大小:0.96 MB |
2017-11-07
分享资料个
无人机是一种有动力、可控制、能携带多种任务设备、执行多种任务,并可重复使用的无人驾驶航空飞行器。与传统的载人飞机相比,它具有体积小、造价低、使用方便、反应快速、机动灵活、对任务环境要求低、生存能力强等优点,鉴于其独有的优势,无人机的应用范围已拓宽到军事、科研和民用三大领域。
近年来,随着各种航空和电子技术的发展,使无人机在性能上得到突飞猛进的发展。随着无人机飞行功能的日益增多,任务要求越来越复杂,使飞行控制系统变的越来越复杂,从而出现故障频率也越来越高。飞行控制系统一旦发生故障,那么极有可能发生坠机事件,造成很大损失。凶此设计具备高容错能力和高可靠性的余度飞行控制系统已成为必然的趋势。
ARM处理器具有功耗低、体积小、性能高,价格低,接口资源丰富,控制能力强等优点,选用ARM处理器进行开发,技术积累性较强,生命周期长,设计重用度高,不易被淘汰。因此本文提出一种基于ARM的双冗余无人机飞行控制系统的设计,实现故障诊断、故障隔离以及故障时的动态重构,提高了无人机飞控系统的可靠性和安全性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





