
资料下载


如何使用STM32单片机进行无人机飞行控制系统设计
林钟忠123
分享资料个
本文从工程应用出发,将航模固定翼飞机作为研究平台,在总结国内外微小型无人机飞行控制系统设计的基础上,提出了低成本飞行控制系统设计方案。
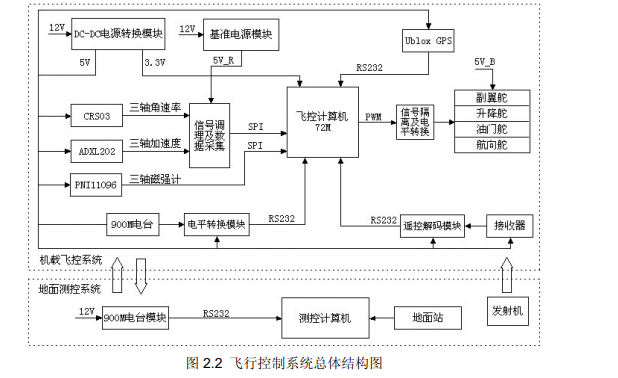
首先,提出飞行控制系统总体方案,对硬件系统进行了详细设计。无人机硬件系统总体分为两个部分:机载飞控系统和地面测控系统,其中机载飞控系统以 STM32 微控制器为核心,集成了数据采集系统、GPS 模块、遥控解码模块、舵机驱动模块、数传电台和电源模块;地面测控系统包括测控计算机、数传电台、地面站软件、发射机等。
其次,对无人机捷联导航算法进行了研究。捷联导航算法用于无人机姿态、速度、位置等信息的滤波解算,是解决无人机飞行状态准确测量的关键技术之一。本文设计了基于误差四元数的姿态卡尔曼滤波算法;同时考虑在大机动情况下,刚体加速度的影响,采用组合滤波的方法,提高姿态解算的精度,并进行了仿真验证;通过引入 GPS 的速度和位置量测信息,分别设计了速度、位置卡尔曼滤波器。
然后,建立了无人机的飞行动力学模型。基于该模型采用 PID 控制方法对无人机纵向、横侧向控制回路控制律进行设计;同时对无人机的自主飞行进行研究,给出了直线自主飞行和圆周自主飞行制导参数的计算方法,并设计了相应的控制律;之后进行了仿真,验证了所设计的控制律。
最后,展开无人机的试验研究,验证了飞行控制系统硬件与捷联导航算法的可靠性和可行性。
无人机是一种由动力驱动、无人驾驶、可重复使用的航空器的简称。在军事上,因为具有零伤亡、战场生存能力强等特点,非常适合执行高危险或人类无法参与的任务;在民用上,它也完全可以代替有人机完成一些任务,如救援搜索、灾情监测、气象探测等。微小型无人机具有隐蔽性强、机动灵活、制造成本低等特点,但由于微小型无人机本身有限的负载能力和体积限制,现有的一些导航和飞行控制系统很难直接在微小型无人机上使用,所以对微小型无人机的嵌入式飞行控制系统进行研究工程意义重大。随着微机械传感技术、全球卫星导航技术、自动控制技术、通信技术的不断发展,无人机已经逐渐进入实用阶段。在军事上无人机已经从单纯的空中侦察到现在的空中监控、导弹攻击、火力制导、通信中继、边界巡逻、甚至战斗任务中都发挥了重要的作用,取得了良好的军事效益,各个国家都给予了相当程度的关注。在民用和警用领域,无人机同样发挥着重要的作用。无人机在航空摄影、地理测绘、遥测遥感、大气监测、环境保护、资源勘探、通信中继、电力巡线、农药喷洒等领域也完全可以替代有人机,具有光明的应用前景。目前,无人机飞行控制系统仍属于国际前沿技术,因为其军事运用价值显著,有必要自主创新,研制具有自主知识产权的无人机飞行控制系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





