
资料下载


×
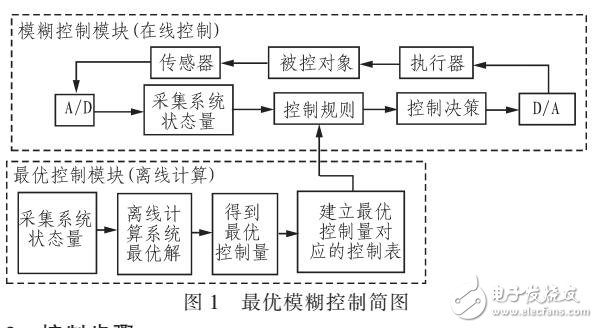
基于最优模糊控制的悬臂梁振动控制系统(Matlab仿真)
消耗积分:0 |
格式:rar |
大小:0.62 MB |
2017-11-14
分享资料个
随着科学技术的不断发展,各行各业的控制技术的不断的更新,越来越多的控制理论日益成熟,如何将若干种控制理论相结合,得到取长补短的控制结果,所以,将多种控制理论相结合也是以后控制领域发展的一个重要组成部分。柔性悬臂梁作为常见力学结构,广泛的存在于生产、生活、科技、航天等多项领域中,而其振动也是影响各种柔性梁正常工作的主要因素,就需要对悬臂梁的振动进行抑制和消除,因此,臂梁的振动控制具有深远的研究意义。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






