
资料下载


×
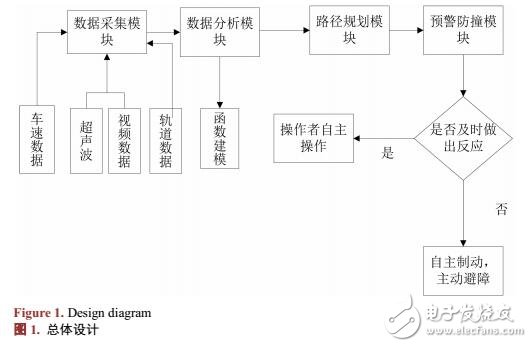
车辆防撞预警系统设计
消耗积分:1 |
格式:rar |
大小:1.00 MB |
2017-11-27
分享资料个
防撞预警能够有效地减少意外事故的产生,是智能车辆领域中一个重要的研究方向,具有广泛的社会意义。国内外学者已经对车辆的防撞预警做了一些研究工作。针对现有研究存在的这些问题,本文通过车辆与障碍物之间的距离和操作者的反应时间两个重要参数建立模糊函数模型,结合鱼群算法,采用模糊逻辑技术分析操作者对预警信号的反应,较好地解决了在复杂动态障碍物环境下的车辆防撞预警问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





