
资料下载


无人机防撞系统开源分享
分享资料个
描述
“无人机防撞系统”,顾名思义,就是保护无人机免受墙壁等障碍物的碰撞。在日常生活中,我们经常听到无人机坠毁的声音,这甚至不会造成机器损失,对周围的人也有很大的威胁. 随着无人机如今变得越来越普遍,因此增加了无人机故障的威胁。所以我设计了这个防撞系统来保护人和机器的损失。
该项目背后的想法太简单了。每当从左侧检测到任何障碍物时,无人机都必须向右漂移,并且在所有四个方向上都相同。通过让一切都非常简单,我只是操纵了发送到飞行控制器芯片的接收器信号。为了检测障碍物,我使用了“超声波传感器”。该项目并不完美,但它仍然是朝着完美的防撞系统迈出的一大步。
1.3 框图说明
在图 1.1 的第一个块中,Rx 表示 Receiver。接收器接收来自飞行员手持的发射器的信号。它将信号值移交给防撞微控制器。传感器给微控制器赋值。然后微控制器根据传感器值改变接收器的值并将其发送给飞行控制器。飞行控制器从陀螺仪传感器获取值,从防撞微控制器获取信号,并将信号发送到运行电机的电子速度控制器。这样所有系统都可以工作。
1.4 应用
1.可用于四旋翼、六旋翼、三旋翼和八旋翼,无需大的改动。
2.可用于自动驾驶汽车。
3.适用于人潮拥挤的摄影无人机。
4.可用于遥控飞机、船等玩具。
5.百叶窗也可以通过一些修改来使用它。
电路说明
2.1 原理图
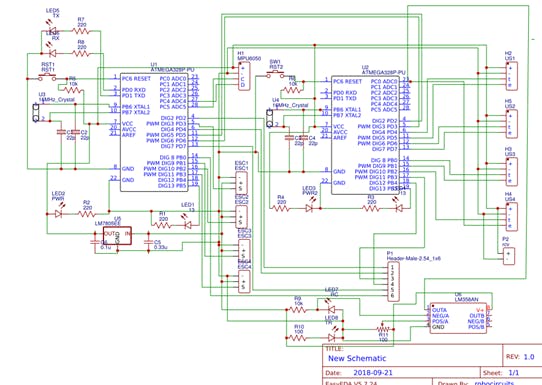
对于这个项目,主要部分是两个“atmega328p”微控制器,如图 2.1 所示。每个微控制器都与一个 16 MHz 晶体以及两个用作滤波器的 22pF 电容器相连。然后,两个微控制器的电源输入端都有一个 LED,带有一个 220ohm 电阻以指示电源输入,还有一个复位开关,该开关与一个 10K 电阻连接至 5V。IC U1 作为飞行控制器,而 IC U2 作为防撞控制器。
从右侧开始,4 个超声波传感器(M2、M3、M4、M5)与 5v 和 GND 连接到来自 IC U5“7805”电源调节器的电源输入。超声波传感器的触发和回波引脚连接到 IC U2 的数字引脚。
接头引脚 H1 用于接收器信号的输入。4 信号通道 3、4、5、6 直接提供给 IC U1 的数字引脚,而通道 1 和 2 提供给 IC U2 的数字引脚,然后通道 1_New 和 2_New 从 DIG 2 和 DIG 3 取出到 IC U1。
陀螺仪传感器 MPU6050 使用 I2C 总线与 IC U1 连接,使用 SDA 和 SCL 引脚分别连接到 A4 和 A5。
4路电调输出取自IC U1的Digital 3、10、11、12脚。该电路的电源来自这些 ESC,因此它们的接地和 5V 引脚分别与 IC 7805 的引脚 2 和引脚 1 相连。然后 IC 7805 的引脚 3 用于为我们的 IC U1、U2、U3、接收器和我们的超声波传感器供电。
IC U3 是一个运算放大器。它与 IR 对连接,其全套充当红外接近传感器,连接到 IC U2 的模拟 0 引脚。
2.2 工作
接收器接收来自地面飞行员手持的发射器的信号。接收器有 6 个输出通道 1、2、3、4、5 和 6 或俯仰、偏航、油门、偏航、AUX1 和 AUX 2。通道 3、4、5、6 直接馈送到飞行控制器 IC,而通道 1 和2 馈送到防撞 IC。碰撞避免 IC 触发第一个超声波传感器,超声波传感器传输超声波信号,该信号被其范围内的任何障碍物偏转并被接收器接收(如下图 2.1 所示)。然后传感器根据声音返回超声波传感器接收器所需的时间将 Echo Pin 设置为 HIGH。然后该信号被馈送到碰撞避免 IC。它还从 Receiver 读取值,例如 (Pitch, Yaw) = (1500, 1500)。每当左超声波传感器检测到 40 厘米内的任何障碍物时,它会将 Pitch 转换为 1650,而 Yaw 将保持不变,这意味着 OUTPUT 将为 (1650, 1500)。如果障碍物来自前方,它将输出为 (1500, 1350) 并且每一侧都相同。然后将此操纵信号馈送到处理电机速度和无人机方向的飞行控制器 IC。这是对这架无人机工作原理的简单解释。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





