
资料下载


×
图像采集与处理在智能车系统中的应用解析
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-12-08
分享资料个
系统概述
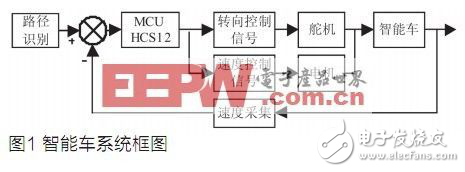
智能小车系统主要由路径识别、速度采集、转向控制及车速控制等功能模块组成。路径识别功能采用CMOS摄像头,将其模拟量的视频信号进行视频解码后,经过二值化处理并转化为18×90pix的图像数据后送入MCU进行处理;转向控制采用基于模糊控制算法进行调节;而车速控制采用的是经典PID算法,通过对赛道不同形状的判断结果,设定不同的给定速度。该系统以50Hz的频率通过不断地采集实时路况信息和速度,实现对整个系统的闭环控制,如图1所示。
智能小车的图像采集与存储
图像采集模块设计
CMOS摄像头正常供电后,便可输出原始图像的信号波形,它是PAL制式的模拟信号,包含行同步、行消隐、场同步、场消隐等信号如图2所示。但该形式的信号并不能被CPU直接使用,需要加入视频解码芯片如SAA7111,它的功能是将摄像头输出的模拟信号转化为数字信号,同时产生各种同步信号,CPU利用此同步信号将图像的数字信号存储在一个外部FIFO芯片AL422中,这便构成了基本的路径检测模块,如图3所示。
智能小车系统主要由路径识别、速度采集、转向控制及车速控制等功能模块组成。路径识别功能采用CMOS摄像头,将其模拟量的视频信号进行视频解码后,经过二值化处理并转化为18×90pix的图像数据后送入MCU进行处理;转向控制采用基于模糊控制算法进行调节;而车速控制采用的是经典PID算法,通过对赛道不同形状的判断结果,设定不同的给定速度。该系统以50Hz的频率通过不断地采集实时路况信息和速度,实现对整个系统的闭环控制,如图1所示。
智能小车的图像采集与存储
图像采集模块设计
CMOS摄像头正常供电后,便可输出原始图像的信号波形,它是PAL制式的模拟信号,包含行同步、行消隐、场同步、场消隐等信号如图2所示。但该形式的信号并不能被CPU直接使用,需要加入视频解码芯片如SAA7111,它的功能是将摄像头输出的模拟信号转化为数字信号,同时产生各种同步信号,CPU利用此同步信号将图像的数字信号存储在一个外部FIFO芯片AL422中,这便构成了基本的路径检测模块,如图3所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






