
资料下载


×
飞行器的动力学方程
消耗积分:1 |
格式:rar |
大小:1.57 MB |
2018-01-10
分享资料个
混合式VTOL UAV是一种垂直起降(VTOL, Vertical Take-Off and Landing)无人机,它是一种集直升机和固定翼飞机的优点于一身的飞行器,它既可以零速度垂直起飞和着陆,又可以进行悬停,又能以固定翼飞机的方式进行高速水平飞行,并具有较大的航程,是一种很有发展前途的飞行器。这种飞行器结构复杂、多输入、多输出、非线性,对其控制起来非常困难。目前国内外对VTOL无人机的研究主要集中在倾转旋翼式无人机、涵道风扇式无人机、T-wing式和Tailsitter式等,而混合式VTOLUAV则是一种非常新颖的飞行器,国内外对其研究较少。
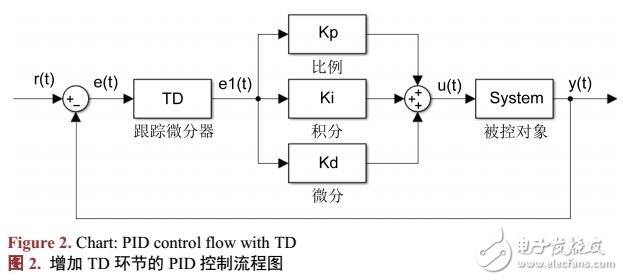
本文首先建立了它的动力学模型,然后对模型方程进行分析,确定输入和输出及状态量,并设计了一种PID闭环控制策略使系统能够输出稳定,最后通过Simulink对其进行了仿真验证了控制系统的有效性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





