
资料下载


×
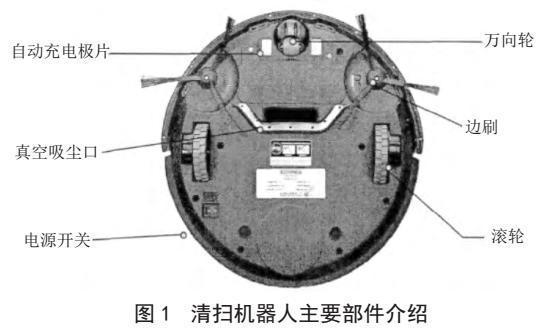
基于单片机的扫地机器人调速控制系统
消耗积分:3 |
格式:rar |
大小:0.16 MB |
2018-01-30
分享资料个
自进入二十一世纪以来,伴随着计算机技术的进步和不断发展,人们逐渐在能实现控制模式的传统机器中添加了处理器,其中应运而生的控制机器就包括清扫机器人。通过这种清扫机器人的使用,使得人们逐步摆脱繁重和重复的体力劳动,不仅如此,清扫机器人还具有良好的环境适应性和相对较高的智能水平,逐渐被人们所关注和接受,因此对清扫机器人进行深入的研究具有现实意义。
本文针对清扫机器人,在单片机基础上,设计了三轮式结构机械平台,对硬件电路进行了设计和制作,通过计算机软件对硬件控制程序进行了编写,实现并完善了环境自动清扫功能。不仅如此,本文还基于研究的结果,开展了路径规划的深入探讨,将策略类路径规划算法在清扫过程中使用,使机器人的清扫效率得到显著提升。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






