
资料下载


如何使用线纹尺的线结构光视觉传感器进行视觉检测标定的方法说明
分享资料个
设计了一种基于线纹尺的线结构光视觉传感器直接标定法,提出了线纹平面靶标与特征点提取算法,不需要建立几何成像数学模型,通过获取已知三维空间坐标特征点的图像坐标,建立亚像素物像索引表,直接在物像索引表中查找相应的图像坐标,得到相应的三维空间坐标实现系统的直接标定。本标定方法对平台运动控制操作方便、算法实现简洁。实验结果验证了本方法的有效性。
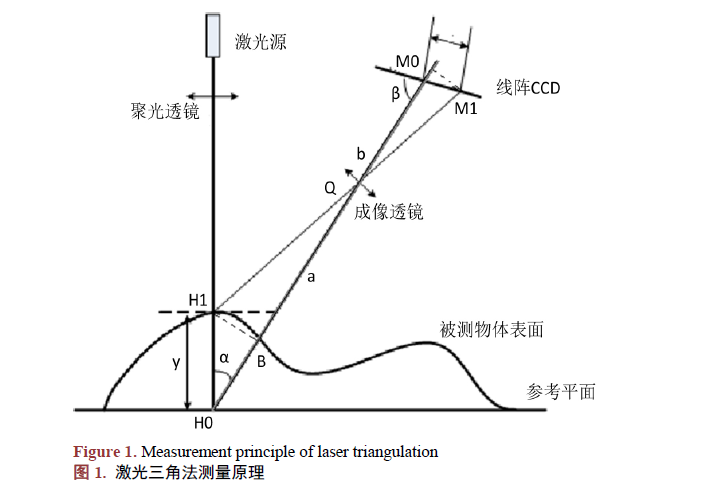
当今社会,基于图像的视觉检测作为非接触式方法已成为一种新的自动化检测技术,常用的方法包括:激光三角法、双目视觉法、相位法等。其中,激光三角法是一种发展较早的非接触三维测量技术,其具有速度快、精度高、抗干扰能力强、结构简单、维护方便,但是其价格昂贵、产品通用性差,制约着激光测量技术在国内的推广与应用。线结构光视觉传感器因价格低、精度高,使用方便已被广泛应用。
常用视觉传感器标定主要分为传统标定法和直接标定法两种。传统标定法先建立几何成像数学模型,分步求解模型中的未知参数值,最后标定光平面与摄像机的位置关系。直接标定方法先设置标定点,建立亚像素物像索引表,再在物像索引表中查找一一相应的图像坐标,不需要建立几何成像模型。
本文在基于现有直接标定算法的研究基础上,提出了一种基于线纹尺的线结构光视觉传感器直接标定,设计了线纹式的平面靶标与特征点提取算法,通过获取已知三维空间坐标特征点的图像坐标,实现系统的直接标定。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




