
资料下载


×
如何使用FPGA实现三目立体视觉外极线校正的方法
消耗积分:0 |
格式:rar |
大小:0.28 MB |
2021-04-01
分享资料个
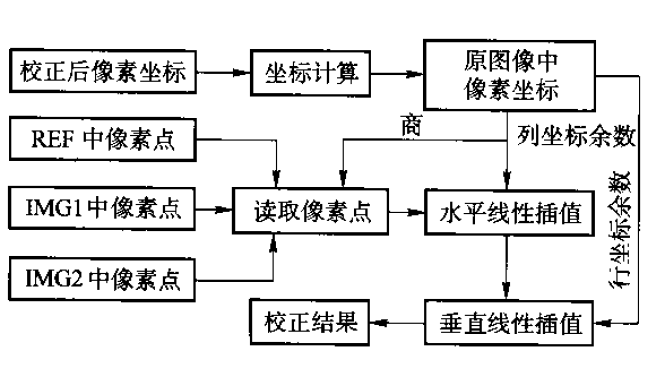
提出一种三目立体视觉外极线校正的快速算法.3个摄像机呈直角三角形配置,且已知摄像机透视投影矩阵。根据校正基本约束确定校正后的图像平面,利用图像不变形约束计算校正所需的三阶矩阵,用于在平面仿射坐标系下对图像进行重取样,使图像的行列对齐。给出了基于FPGA的实时计算三目立体视觉外极线校正的硬件实现方法。在时钟频率为60 MHz,图像可分辨的像素数为640×480时,三目立体视觉外极线校正速度达到48帧/s。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 chenlance2979
2021-05-31
0 回复 举报承接fpga和芯片开发项目, 免费分享技术资料2T云盘, +VX: www8928 收起回复
chenlance2979
2021-05-31
0 回复 举报承接fpga和芯片开发项目, 免费分享技术资料2T云盘, +VX: www8928 收起回复
- 相关下载
- 相关文章






