
资料下载


如何设计一个面向物流分拣的多立体摄像头物体操作系统
分享资料个
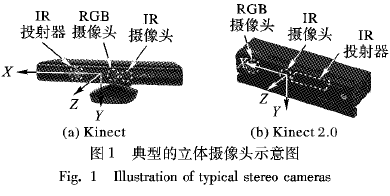
为满足物流分拣的低成本和实时性要求,提出了基于多个立体摄像头的系统获取典型物体的完整立体信息的方法,并结合机械臂搭建了实验硬件平台。实验采用了2个微软Kinect摄像头在水平面上实现了约3 mm精度的物体定位,根据物体的立体信息建立立体模型,并计算了物体的取向、尺寸、含有的平面等多个可用于物体操作的立体特征,计算速率约为1 s/帧。根据这些信息,使用了机械臂成功进行了连续100次抓取。实验结果表明,这套方法和平台无需离线学习即可以实时提取多种尺寸和形状的物体的立体特征,机械臂可以基于此进行精度较高的物体操作。
飞速发展的电子商务对物流行业提出了越来越高的要求,传统的人工分拣方式已经逐渐无法满足需求。为了节省时间和空间,每个物流节点需要快速将物件按照大小、形状、目的地进行分拣和装载。机械臂技术的不断发展使得机器人可以以相当高的精度和智能度进行物体操纵,可以帮助人类分拣物件。典型的机器人参与的物流分拣场景类似于工厂装配流水线。机械臂和传感器安装在平台上,位置相对固定;待分拣的物体用传送装置运输到平台当中,系统对它们进行识别和定位,然后由机械臂将其分拣到不同的运输设备上。这种场景下,需要能够实时对平面上所有物体的尺寸、形状、表面特征、适合抓取的位置等进行识别,使得机械臂能够选取合理的模式进行操作。因为待分拣物件的种类无法预先确定,识别系统需要较强的泛化性能。同时,分拣系统的成本需要控制在合理范围内,而识别与定位精度只需要满足操作要求即可。对于典型大小的物件,定位精度约为5 mm以下就可以保证操作成功。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






