
资料下载


如何在Simulink永磁同步电机调速系统中进行设计与仿真
年少无畏
分享资料个
基于空间矢量脉宽调制原理 ( SVPWM) 和滑模控制 ( SMC) ,在 Simulink 中建立永磁同步电机 ( PMSM) 调速系统模型,文章建立滑动模态的状态轨迹模型。使被控对象在动态过程中按照建立的模型运动; 由于滑动模态具有不变性,使系统不受对象参数和扰动干扰,在工程应用中具有很强的鲁棒性。通过系统仿真验证了系统对永磁同步电机的控制具有响应速度快、转矩脉动小、鲁棒性好等优点。
永磁同步电机 ( permanent magnet synchronous motor PMSM) 是一种以三相电流通入定子绕组中形成旋转磁场,安装有永磁体的转子随旋转磁场一起转动的电机。目前,永磁同步电机主要分为矢量控制和直接转矩控制,两种控制策略都可以实现高动态性能变频调速系统的设计,其中矢量控制具有调速范围宽、启动转矩大、工作可靠和操作方便等特点。随着理论研究的发展,许多现代控制理论中的控制策略被逐渐应用到永磁同步电机的调速系统中,其中滑模控制理论在提高鲁棒性上有独特优势。为了使永磁同步电机调速系统对参数变化及扰动不灵敏,提高系统的稳定性和鲁棒性,设计滑模控制器对系统的速度反馈进行调节控制。
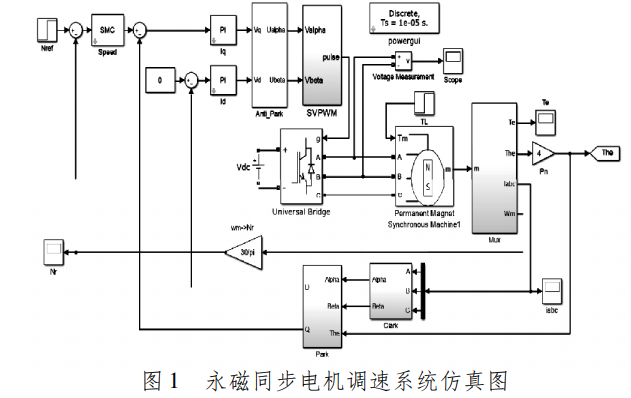
系统以永磁同步电机为研究对象,利用空间矢量脉宽调制原理 ( SVPWM ) 和 滑 模 控 制 (SMC),基于 Matlab /Simulink 搭建永磁同步电机调速系统仿真平台。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



