
Wayve:从源头讲起,如何实现以对象为中心的自监督感知方法?

基于PoseDiffusion相机姿态估计方法
Meta用头显实现全身动作追踪!没有腿部信息,也可准确估计姿态

APE:对CLIP进行特征提纯能够提升Few-shot性能

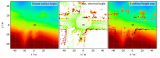
南开大学提出LSKNet:遥感旋转目标检测新SOTA!
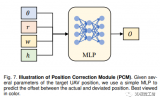
无人机实际位置之间的偏移量怎么算

ECV2023大赛仪表盘读数识别德国冠军方案解读

首篇!Point-In-Context:探索用于3D点云理解的上下文学习

我训练了一个模型,让开发板认识自己
均匀B样条采样从LiDAR数据中快速且鲁棒地估计地平面

X-RiSAWOZ: 高质量端到端多语言任务型对话数据集

AIGC时代的ImageNet!百万生成图片助力AI生成图片检测器研发
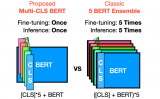
Multi-CLS BERT:传统集成的有效替代方案

CVPR 2023中的领域适应: 通过自蒸馏正则化实现内存高效的CoTTA

2D Transformer 可以帮助3D表示学习吗?
使用DSFD检测DarkFace数据集过程

V853端侧部署YOLOV5训练自定义模型全流程教程

SA-1B数据集的1/50进行训练现有的实例分割方法

大模型如何快速构建指令遵循数据集

GLoRA:一种广义参数高效的微调方法

 下载APP
下载APP
 搜索内容
搜索内容
