PCL匹配器滤除点云方法
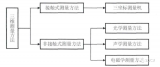
PCL滤波配准常用的滤波方式
激光雷达点云预处理介绍

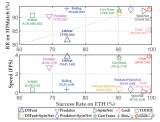
预训练扩散大模型取得点云-图像配准SoTA!
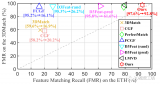
CVPR2023 I BUFFER:点云配准中卓越精度、高效性和泛化性的完美平衡
CVPR2022;直接从点云提取3D基元
三维点云配准过程详解:算法原理及推导
总结!三维点云基础知识

三维场景点云理解与重建技术

0参数量+0训练,3D点云分析方法Point-NN刷新多项SOTA

首篇!Point-In-Context:探索用于3D点云理解的上下文学习
如何实现面向三维点云的信息丰富的旋转不变特征
Limap:基于3D line的重建算法
DeepFusion:基于激光雷达和相机深度融合的多模态3D目标检测
点云压缩研究进展与趋势

 下载APP
下载APP
 搜索内容
搜索内容
