
PC强实时运动控制(一):C#的EtherCAT总线初始化(上)

Trinamic 芯片的微步设置对精度影响多大?

IMU P/N 616-4042在卡特彼勒装载机与挖掘机中的精准运动控制与可靠性实践
强实时运动控制内核MotionRT750(十):运动控制中的微调轨迹动态补偿
强实时运动控制内核MotionRT750(九):内置C语言的自定义机械手模型实现
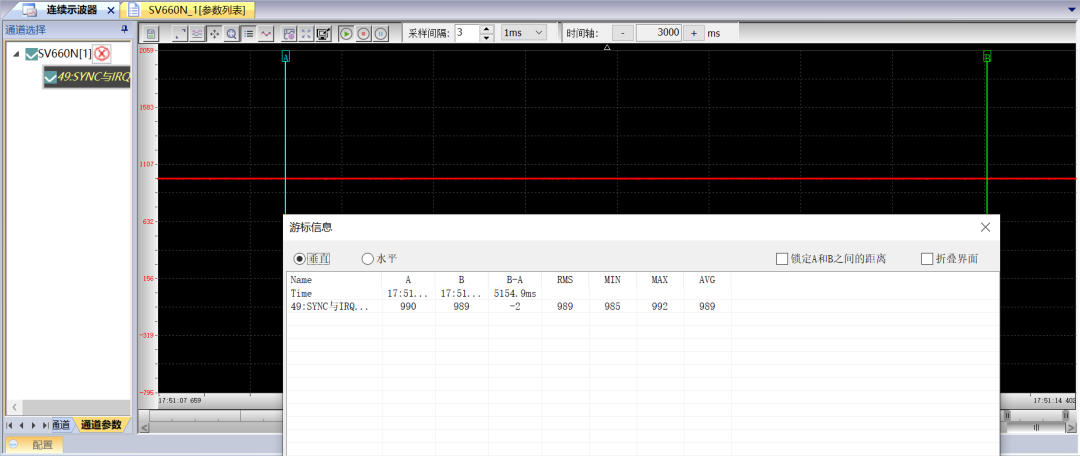
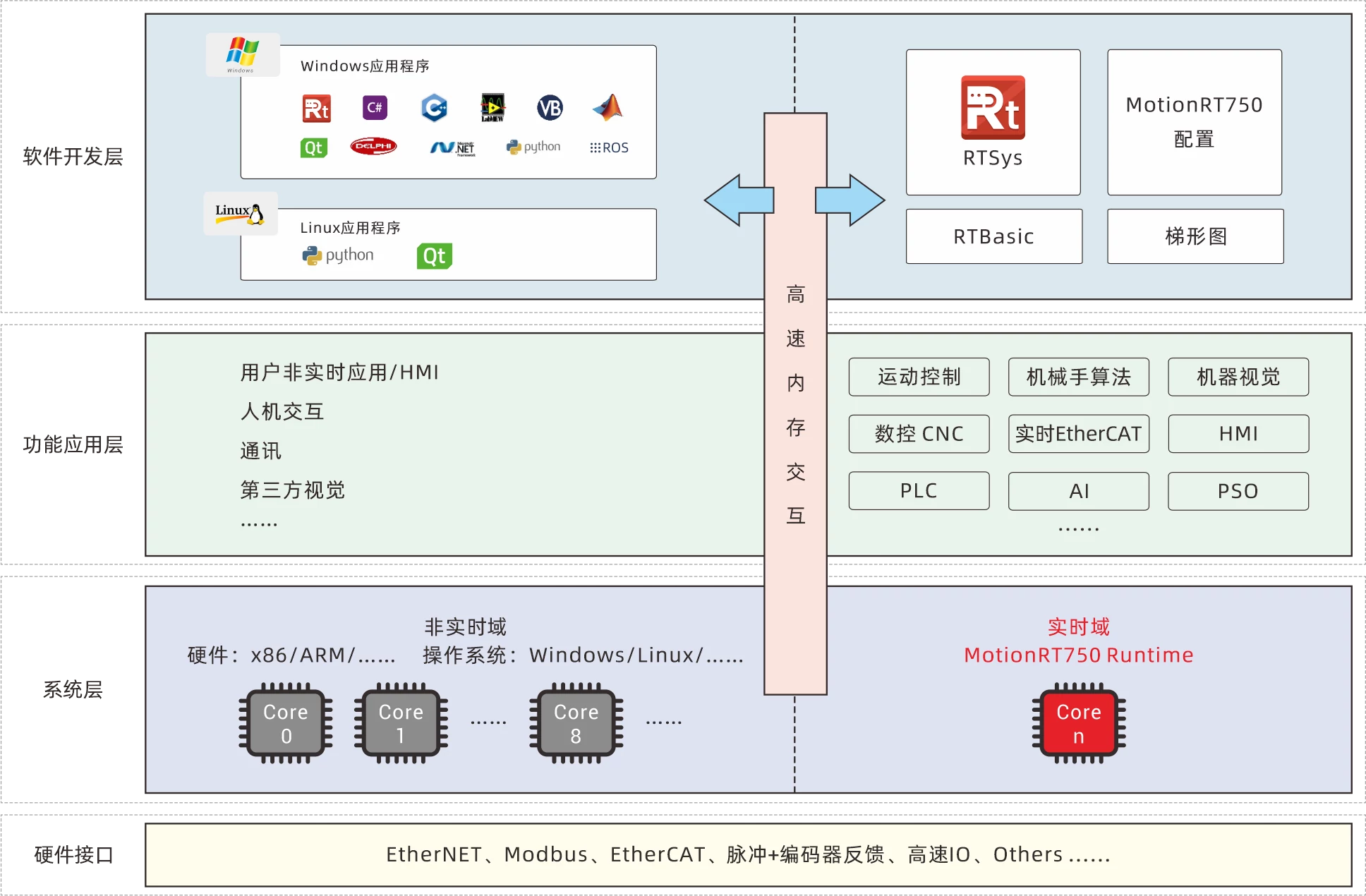
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析

伺服电机和步进电机的核心区别

航空动力“中国芯”:国产EHA在发动机燃油、滑油系统的应用
电动静液作动器(EHA)技术解析:现代高精度运动控制的革命性突破

TMC5041:单芯片双轴步进电机驱控方案,赋能精密静音运动控制
TMC2300步进驱动IC深度解析:从静音到节能,超小尺寸赋能物联网
ADI TMC8100 通用编码器总线控制器:高精度运动控制的位置反馈核心方案

交叉导轨从测试仪到工作台的精密运动控制

边聊安全 | 以L3级自动驾驶为例,详解DDT、DDT Fallback、MRC、MRM概念

基于RT-Thread与K230(玄铁C908)的运动目标控制与追踪系统 | 技术集结

AWStudio:轻松设置EtherCAT分布式时钟,提升同步精度!
实时监控与诊断,让EtherCAT网络管理更轻松!

宏集干货 | 手把手教你通过CODESYS V3进行PLC编程
飞创解读磁悬浮直线模组:原理、优势与多元应用
强实时运动控制内核MotionRT750(四):高速贴装应用中的拱形运动

 下载APP
下载APP
 搜索内容
搜索内容
