
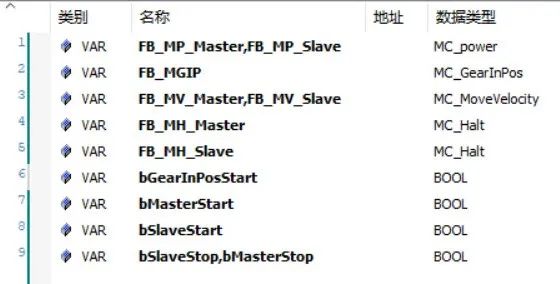
CODESYS可视化案例—双轴位置同步控制
深度解析机器人控制技术背后的机械原理
S7-1200PLC运动控制案例介绍

基于RS60E系列的机器人专用伺服驱动器

EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制
新一代车规级高速协作机器人优势何在?

运动控制与自动化plc过程控制有何区别呢

过程自动化控制和运动自动化控制的原理详解
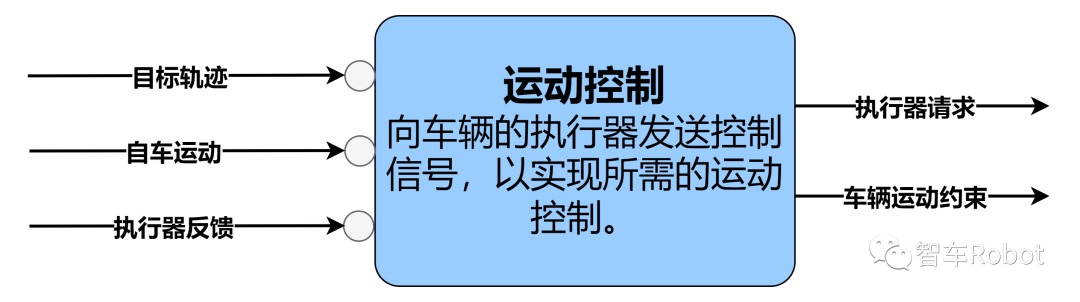
自动驾驶运动控制原理
基于CPAC运动控制的两轴伺服电机控制
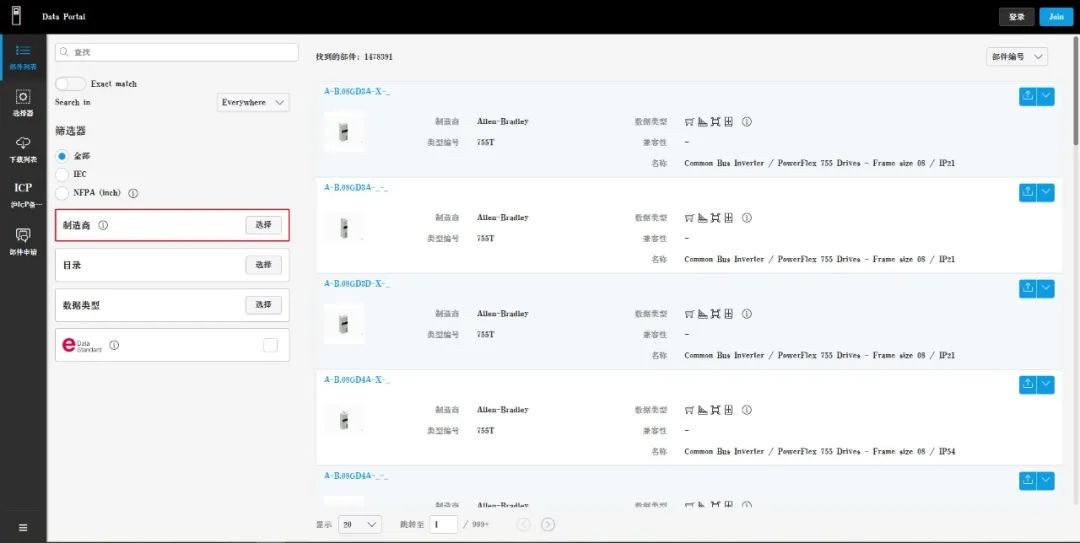
正运动部件库导入步骤 正运动部件库数据查看指南

超高速PCIe实时运动控制卡解决方案
如何实现直线电机模组的高精度运动控制呢?
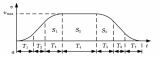
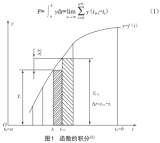
电机运动控制算法之S速度曲线规划算法
人形机器人为何这么火爆
什么是线扫系统 线扫系统机器视觉部分的选型要点

EtherCAT运动控制边缘控制器功能简介和自定义API封装例程

降低运动控制应用中可闻噪声的三种出色方式
水下机器人的设计与实现
变频器的分类和发展趋势

 下载APP
下载APP
 搜索内容
搜索内容
