
基于恩智浦(NXP)LPC845芯片的BLDC电机无感方波驱动方案

蔚来自研4D毫米波雷达的原理解析

关于NXP Zigbee JN516X JN517x JN518X用vsCode studio环境开发编译

基于恩智浦(NXP)S32K344芯片的车身控制模块(BCM)方案

MIMXRT1060 EVK JTAG接口修改方法
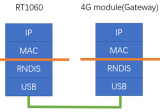
使用i.MX RT1060连接USB 4G module(RNDIS模式)
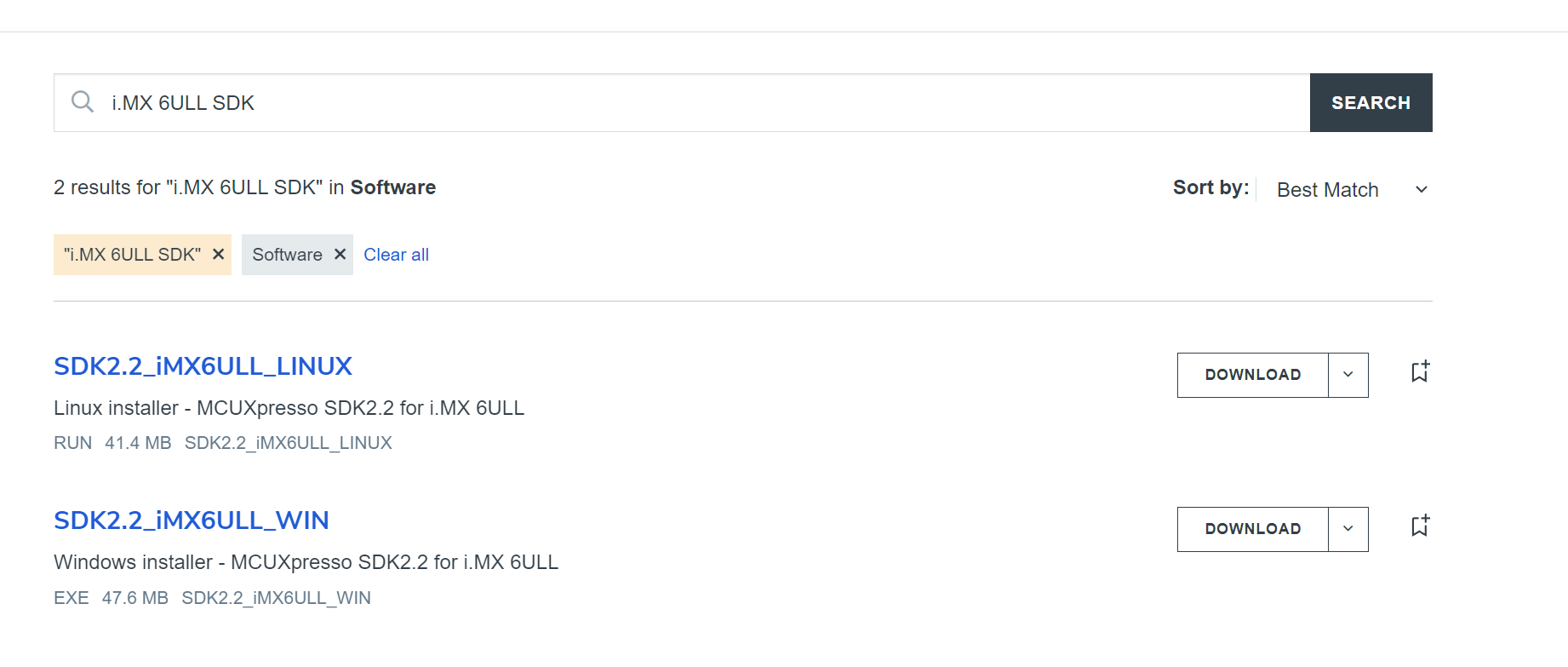
I.MX6ULL官方SDK驱动LED灯
Flexible Safety RTOS支持NXP S32K高性能处理器

如何在U-Boot中添加自已的开发板
在U-Boot中驱动LCD和网络
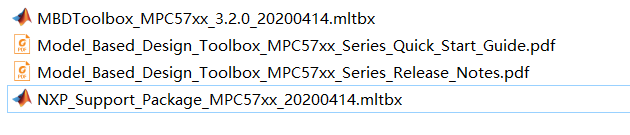
基于MBD模型设计的PWM输出步骤和方法
基于MBD模型设计的CAN通信步骤和方法
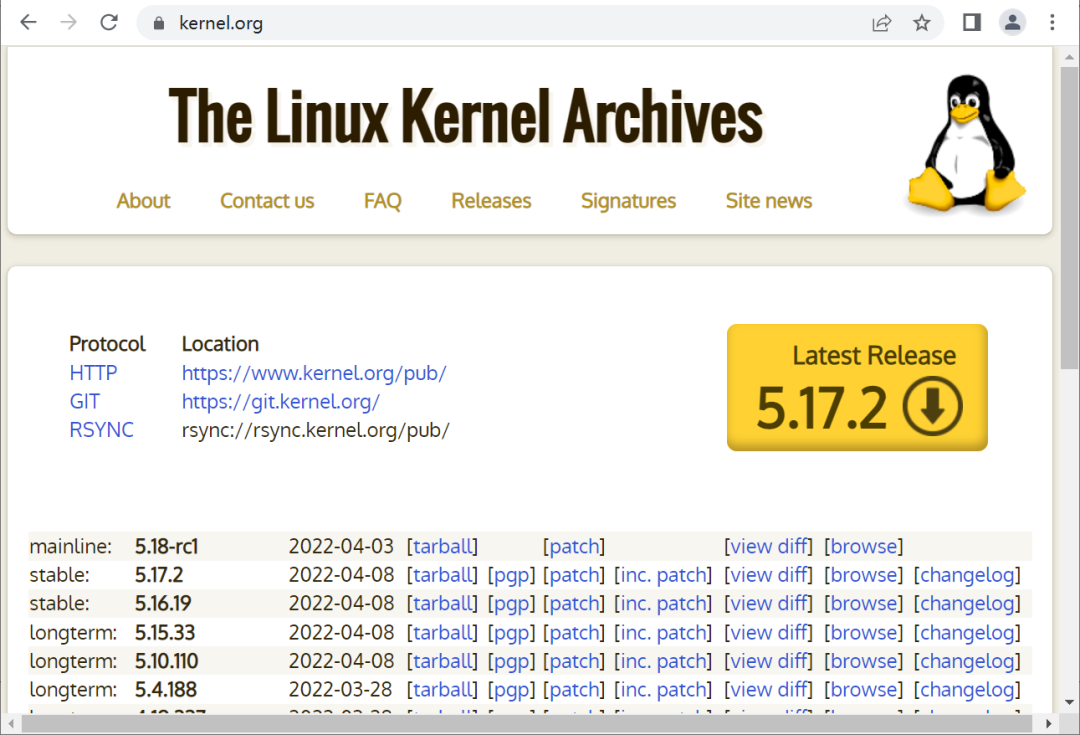
Linux内核初次编译和源码结构
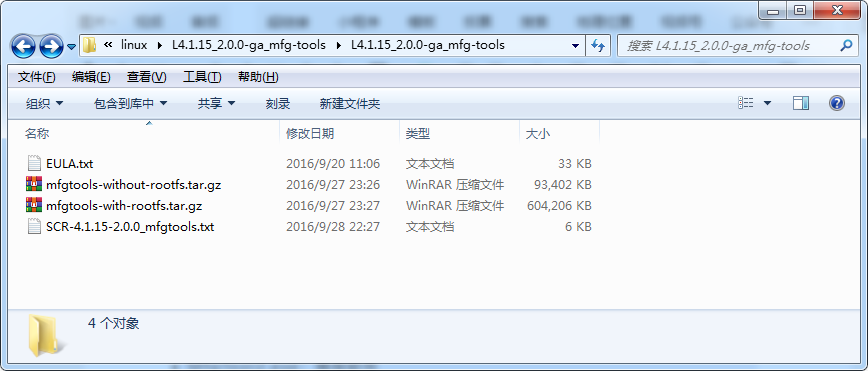
Linux系统烧写初探
保护IP摄像头:安全和不安全之间,原来就差一颗安全芯片
使用Complete FDCB模式恢复擦写异常的QSPI Flash

入门级i.MX6UL板卡的神经网络框架ncnn的移植与测试-米尔MYD-Y6ULX-V2开发板
S32K3电机控制资源精华汇总
NXP新能源汽车整车控制器基本功能 整车控制器系统结构框图
基于SWD离线烧写OTP

 下载APP
下载APP
 搜索内容
搜索内容

