
机器人里程计数据的上传与接收
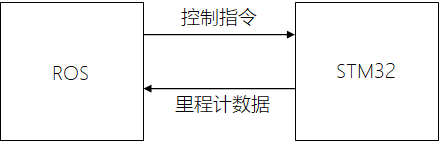
ROS与移动底盘的通信试验内容
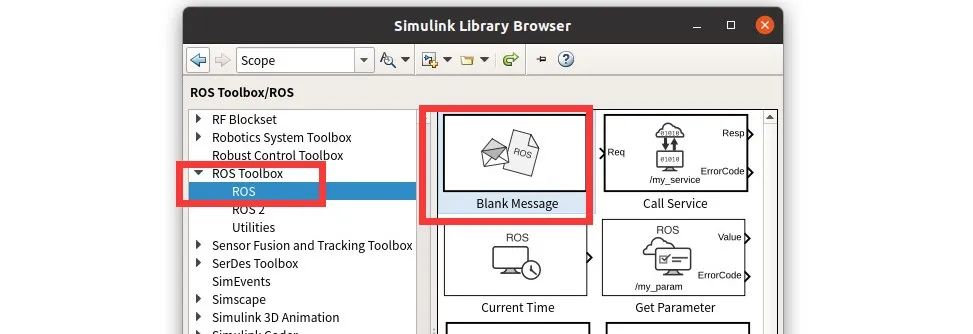
Matlab中创建一个Message方法
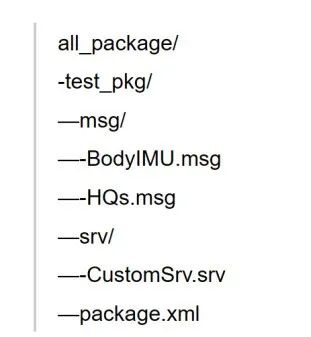
如何在Matlab中自定义Message
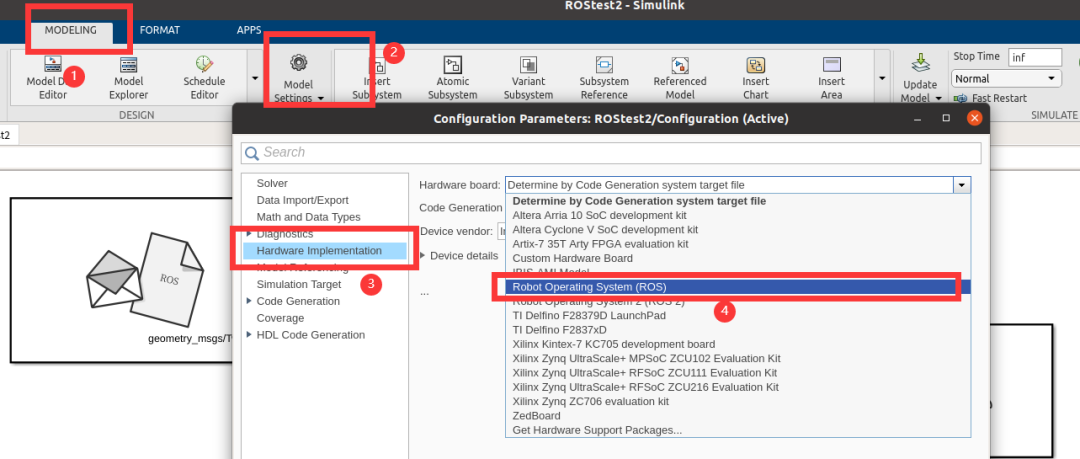
simulink自动生成ROS代码
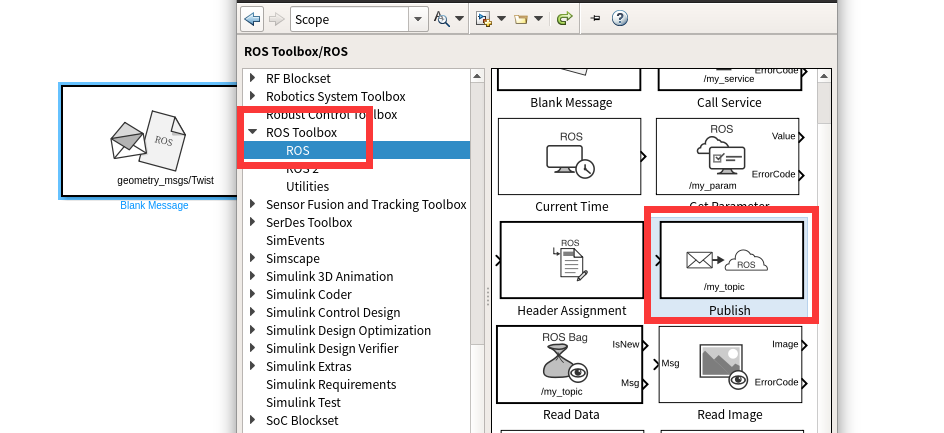
Simulink中如何创建一个Publisher
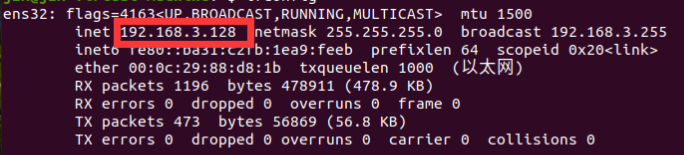
如何初始化ROS并创立链接
机器人中特殊的消息类型
ROS中Message队列介绍

如何将ROS数据类型转换为MATLAB数据类型
ROS中如何设置消息信息
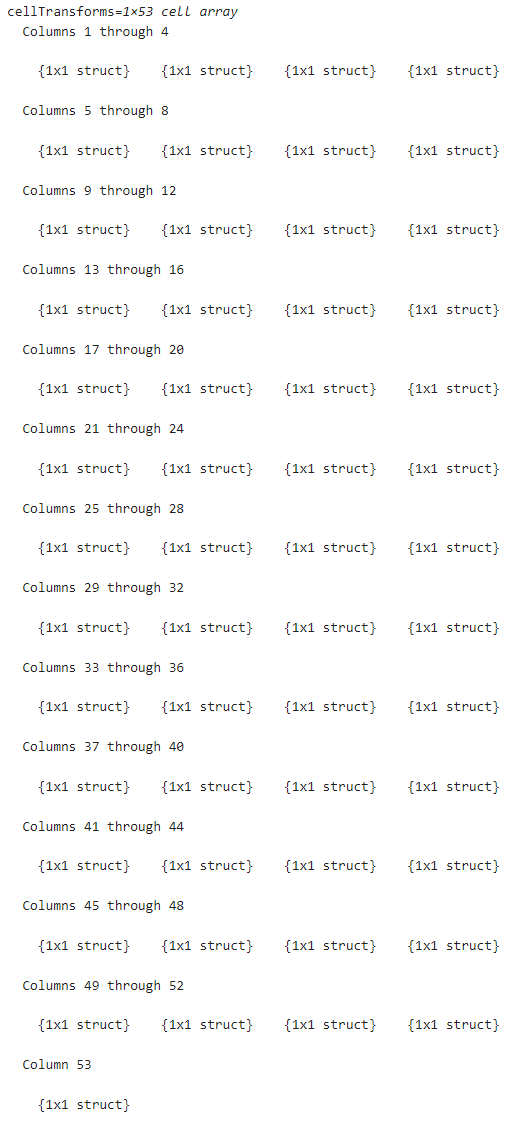
MATLAB消息结构获取方法

ROS的基本概念和系统架构 ROS的安装和简单测试

移动机器人的ROS导航堆栈技术手册
基于RT-Thread的RoboMaster电控框架(六)

ROS系统读取USB相机图像数据
快速上手micro ros在RT-Thread上

ROS部署PaddlePaddle的CV模型

聊聊无人机飞控的两类操作系统介绍

如何在ROS2中开发一种计算机视觉模块呢?

 下载APP
下载APP
 搜索内容
搜索内容
