
MentorPi A1、MentorPi M1、MentorPi T1 三款ROS2机器人怎么选?

为什么说MentorPi是ROS入门学习的理想伙伴?

解开MentorPi三种底盘的小秘密

SLAM导航+AI大模型能迸发出哪些火花?

别小看这些细节!LanderPi硬件设计的5个匠心之处

如何用树莓派5打造高性价比的ROS复合机器人

LanderPi复合型机器人,SLAM导航+AI大模型+3D视觉的组合拳能有多炸裂?

用ArmPi Ultra,打造你第一个具身智能项目

如何在Kria KV260上跑ROS 2和TurtleBot3 Waffle

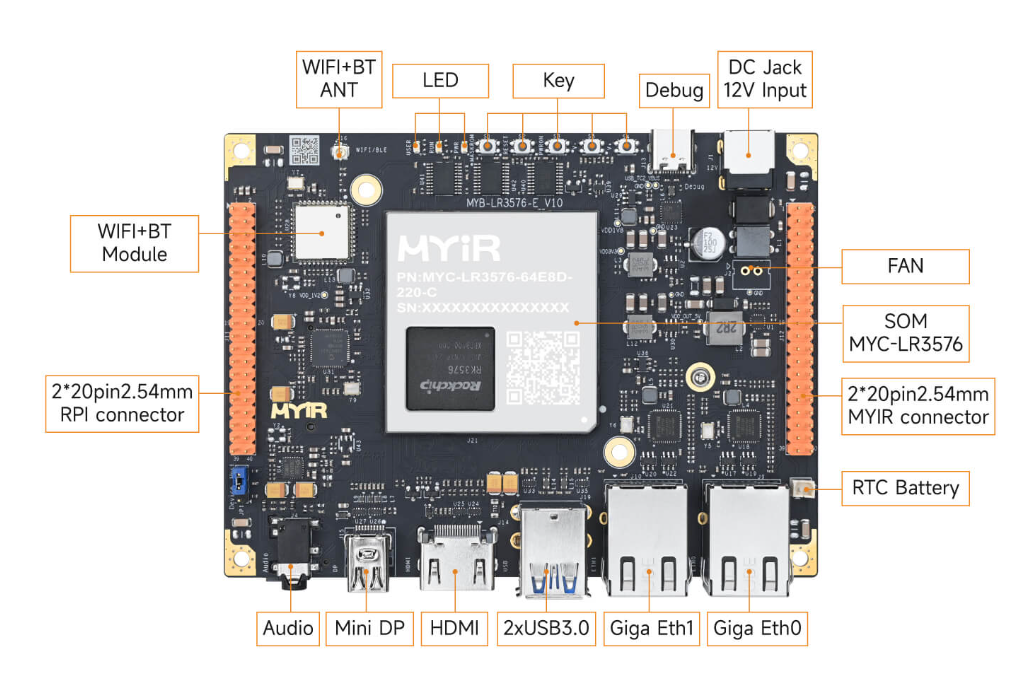
开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统
RK3576 + ROS2 SLAM建图与导航实战

EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用

ROS 传感器模块的通用架构设计与跨中间件扩展实践
一体化ROS智能驾驶小车及实训教学平台解决方案

硬核上车!RK3576基于Ubuntu部署ROS机器人系统详细攻略(下)

硬核上车!RK3576基于Ubuntu部署ROS机器人系统详细攻略(上)
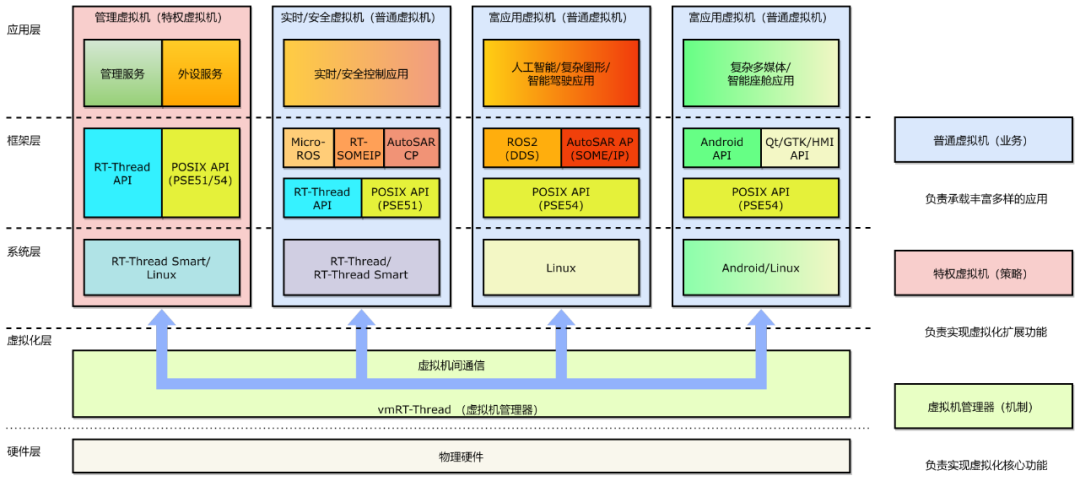
通过vmRT-Thread和ROS2赋能机器人智能开发

如何将python文件导入到ROS系统中
在Mac上使用Docker构建noVNC环境并运行MyCobot

基于英特尔开发板开发ROS应用

 下载APP
下载APP
 搜索内容
搜索内容
