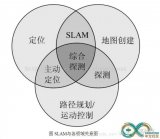
浅析基于SLAM的机器人自主定位导航
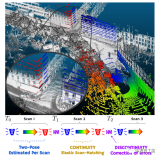
CT-ICP:实时弹性激光雷达里程计与回环检测

实时语义建图与潜在先验网络和准平面分割

SLAM和三维重建有什么联系和区别?

TRO新文:用于数据关联、建图和高级任务的对象级SLAM框架
反光柱导航开发与实验
激光slam和视觉slam

基于感知质量的无人机ActiveSLAM解决方案

3D激光SLAM是用LOAM还是LeGo-LOAM?

简要介绍ActiveSLAM的应用场景

用于自动驾驶的同步定位和建图 (SLAM):概念和分析
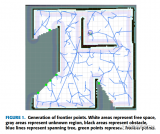
基于RRT算法生成机器人搜索路径的算法

ORB-SLAM3整体流程详解

用于神经场SLAM的矢量化对象建图

使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验
聊聊3D激光SLAM开源算法-LeGo-LOAM
基于LeGo-LOAM框架的激光SLAM技术解析
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现

VPS、GPS与SLAM的区别与联系
高翔博士分享:单目SLAM在移动端应用的实现难点有哪些?

 下载APP
下载APP
 搜索内容
搜索内容
